
机器人也要多栖发展了
北京环球影城的「威震天」出名了,谁能想到向 00 后安利《变形金刚》最成功的,竟然是一个真人扮演的机器人呢。魔怀
我们什么时候能造出像「威震天」这样的机器人?从「碎嘴」角度来说,目前的机器视觉和自然语言处理技术其实已经能做到差不多 90% 了。不过,相对于语言能力,其实「威震天」最难复制的是其双足稳定行走和随时起飞的能力。
近日,Science Robotics 就报道了有团队想让机器人变得上天入地、多栖发展。
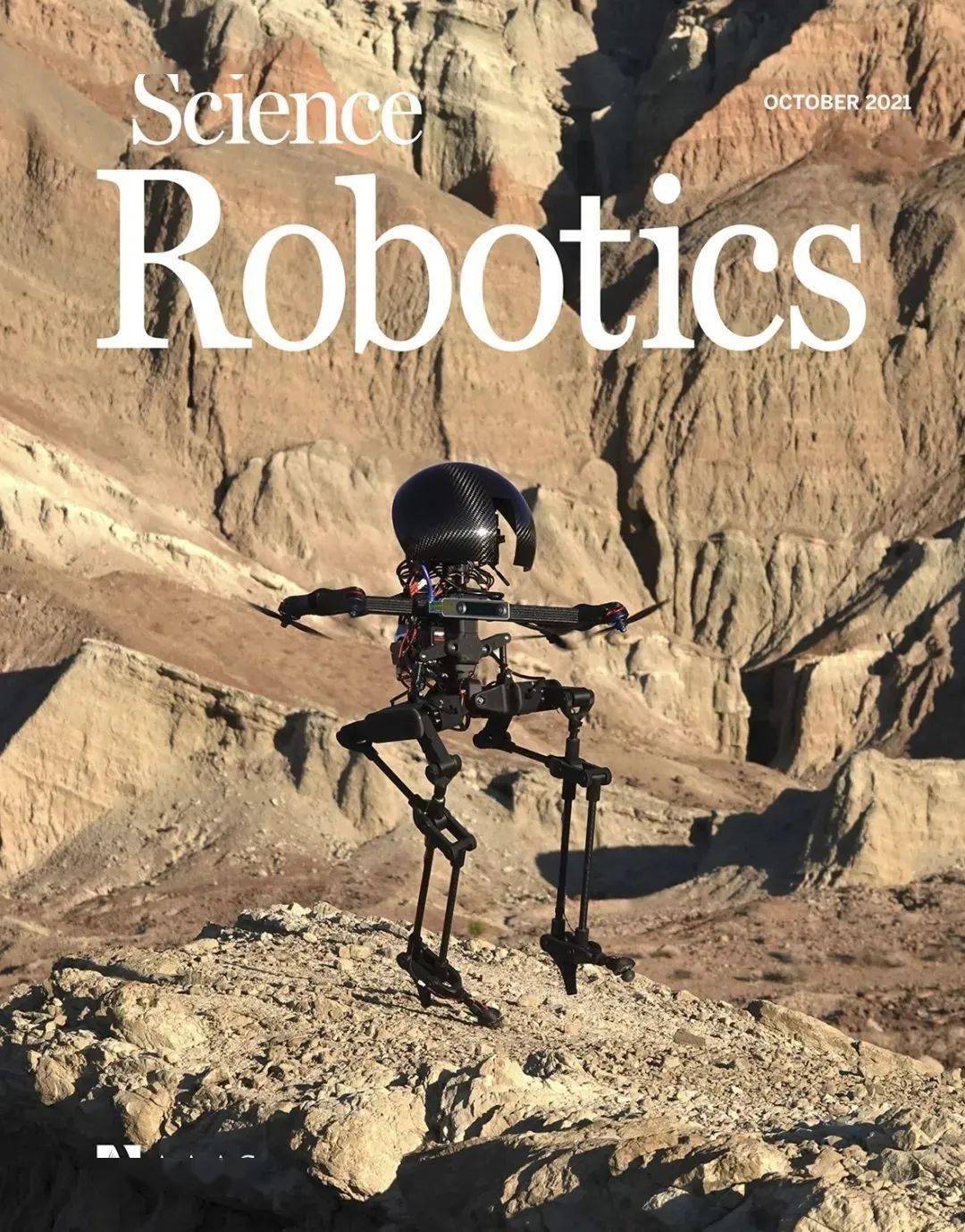
本月 Science Robotics 封面| Science Robotics
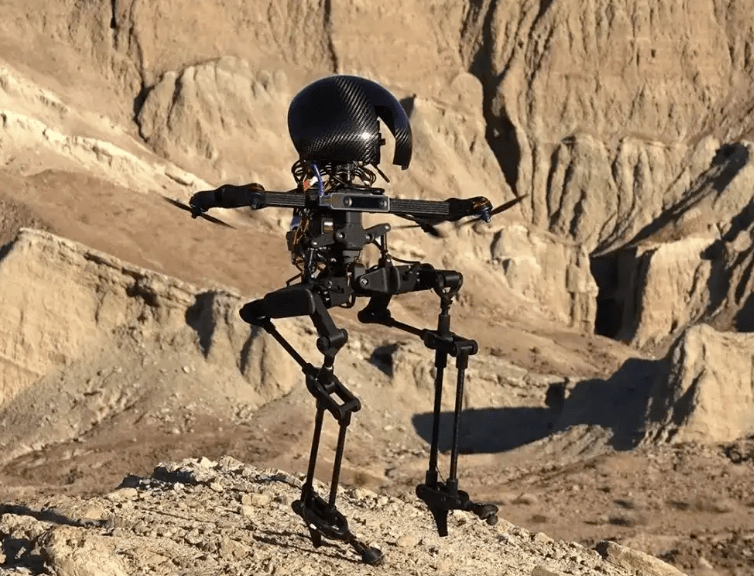
「LEONARDO」(legs onboard drone,简称「LEO」)是美国加州理工学院的研究人员开发的一种新型双足机器人,它结合了双足行走与飞行两种运动姿态,无论是灵活性还是平衡性都十分突出,甚至能玩滑板、走钢丝。
也许在不久的将来,具备混合运动能力的新型机器人,将在高压线路检修、高空桥梁喷绘等传统机器人无法触及的领域大放异彩,把人类从危险的高空作业中解放出来。魔怀
01
鸟类带来的灵感
正是鸟类在行走和飞行之间不断切换的运动状态激发了研究者们的想象。
「当鸟类在行走和飞行之间转换时,其中包含许多复杂而有趣的行为,正是这一点给了我们启发。」
鸟具有两种运动模式,它们能用翅膀在天空中翱翔,也能用双足在陆地上轻巧地移动。先前已经有许多机器人是在自然观测与仿生的基础上进行设计的,比如双足机器人更多地是学习人类双足行走的方式,四足、六足等多足机器人则是通过观察四足哺乳动物的步态进行研究与开发。
同样,研究双模态运动机器人的一个方向就是基于对鸟类的科学观察,采用生物启发的方式来促进其发展。
在目前已有的机器人中,真正能投入使用的大都是单一运动模式的机器人,像是只能在地面上行动的轮式机器人、仿人机器人、多足机器人,或者是只能在天上飞的无人机产品,单一的运动模式更具有针对性,却也限制了它们执行更多的任务。

LEO 既能飞行也能行走,具有双重运动模式
研究人员此次提出的多模态运动机器人的设计和控制,通过分布式电动推进器和一对多关节腿地同步控制,弥合了飞行和行走两种不同运动机制之间的差距,两种不同运动机制的结合,使得未来机器人从事复杂工作有了新的可能。魔怀
相较于地面机器人,LEO 可以同步控制其螺旋桨和腿关节,因此具有较强的抗干扰能力。这种优势让 LEO 可以克服许多复杂的路面障碍,即便在光滑的表面上也可以避免坠落的危险;而与飞行器相比,LEO 可以在低空飞行时根据需要选择是否降落到物体表面,以便于近距离执行检查、观测等任务。
02
能飞能走,自由切换
「拥有两种以上运动模式的生物,必须学习并掌握如何在不同模式之间切换」,机器人也不例外。
LEO 整体高度 75 厘米,2.58 公斤,主要由躯干、螺旋桨推进系统和两条带尖脚跟的腿三部分组成,它的吸收功率为 544W,其中 445W 用于螺旋桨,99W 用于电子设备和腿部,LEO 可以通过机载计算机和传感器组建完全自主运行。
要让机器人能飞能走,还能自由切换并非易事。
双模态甚至多模态运动机器人在实践中一直是个挑战,只有在机械设计、建模和分析、控制系统设计和制造都有所突破的情况下,机器人才能自如地在不同运动模式间来回切换。
想要飞起来,首先要控制机器人的整体重量。为了使其足够轻量化,LEO 的腿部结构采用碳纤维管和 3D 打印碳纤维增强尼龙关节来支撑滚珠轴承。
其次,为了减少在飞行过程中惯性对机器人运动的影响,LEO 腿部的几何设计有两个封闭的运动回路,这种平行结构允许腿执行结构放置接近躯干,形成一个更为紧凑的结构,从而减少惯性。
在运动驱动方面,LEO 的每条腿上装有 3 个伺服电机,一个位于骨盆处,另外两个位于髋部的前后;在控制方面,LEO 有两个并行运动控制器,分别用于行走和飞行。
LEO 正在绳索上行走
行走时,机器人的腿部承担大部分重量,这时螺旋桨仅起到稳定运动的作用。 飞行时,得益于肩部放置的四个对称式的螺旋桨,LEO 拥有较好的平衡性,可以完成一些常规机器人难以完成的动作,比如在绳索上行走,滑滑板等等。
与此同时,在螺旋桨的帮助下,即便在达 3.8 m/s 的风速下机器人也能保持稳定,抗干扰性极强。
而两种运动模式切换的关键,隐藏在机器人的脚部。
LEO 的脚部有一开关,它决定了 LEO 什么时候可以在地面上正常行走,什么时候需要切换为其他的运动模式。此外,LEO 每条腿的末端都有一个半球形的聚氨酯橡胶,该部位的摩擦系数较高,主要用来防止机器人在站立和行走时打滑。
两种运动模式的切换,可以通过其机载计算机和传感器套件完全自主运行。
03
双模态运动机器人的未来
既能飞也能跑的双模态运动机器人,无疑拓宽了更广阔的应用场景。
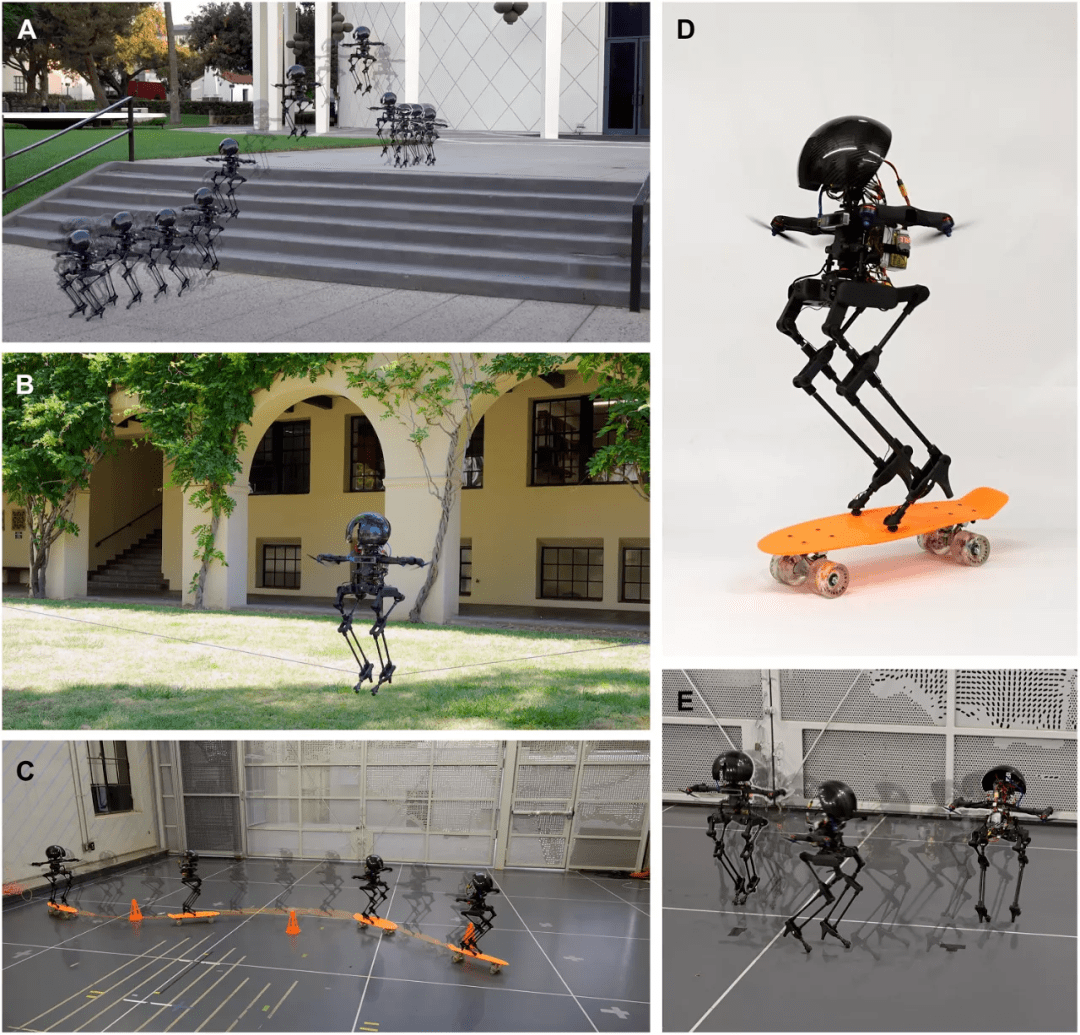
LEO 拓宽了更多应用场景| Science Robotics
「涉及高空作业的危险环境,也许是最适合 LEO 的应用场景。」研究人员在论文中提及。
凭借着出色的平衡能力,LEO 可以飞行降落到某些高空环境中,并通过可以自由运动的双足近距离的接触环境表面,从而完成许多其他类型机器人无法完成的任务。比如——高压线路检测工作,LEO 可以降落到电线上并沿着电线行走,进行检修工作,降低维护成本的同时,也减少了人类在从事这类工作时可能遇到的危险。
此外,该研究团队认为 LEO 所具备的技术可以促进自适应起落架系统的发展,他们设想未来的火星旋翼机可以配备腿式起落架,以便使它们降落在倾斜或不平坦的地形上时可以保持身体平衡,从而降低在着陆失败的风险。
虽然四个螺旋翼的设计让 LEO 在即便遇到外力猛推的情况下也不会摔倒,但这一切是以极高的能耗为代价实现的。能耗越高则意味着 LEO 的能量效率越低,不利于其长时间执行任务。
为此,研究人员计划改进腿部的设计、提高 LEO 性能,使 LEO 能够在最少的螺旋桨帮助下行走和保持平衡。
目前该机器人尚不出售,为了使 LEO 在未来能够更充分地发挥其混合运动模式的优势,研究人员计划在未来开发一套新的控制算法,利用深度神经网络控制其着陆,以便让机器人更好地了解落地环境,自主选择采取哪种运动模式。
*图片来源:视觉中国
本文为极客公园原创文章,转载请联系极客君微信 geekparker
我们寻找深度报道作者
过去 11 年间,极客公园一直在发现生生不息的创业者,与他们共同成长,致力于成为与之持续交流的「思考伙伴」。回顾最初,还在做团购的美团王兴、还没做今日头条的张一鸣、开始做小米手机但无人看好的雷军、还未在行业登顶的 Elon Musk 等等,极客公园都更早地发现了他们的价值。
因为努力打造创新者的社区,才有机会理解创新,并陪伴一些先锋者们率先看到未来。我们也希望提供有价值的信息和判断,把这种世界观分享给更多人。
我们正身处于一个剧烈变革的时代。一些人与企业,正以科技为支点,撬动着产业发展、经济模式、生活方式乃至人们的精神世界。极客公园希望提供深入、可信的行业分析,扎实、准确的深度长文章,并与关键人物建立对话。我们希望在浩瀚的科技商业史中发现一个个鲜活的「人」。
如果你有志于上述愿景,欢迎加入我们。我们期待爱思考、肯下苦功、怀有好奇心且具极强行动力的伙伴,同时,分析能力与写作能力也很被看重。除了体面的待遇,这里还十分看重个人的成长,你将得到悉心的引导或全力的配合。
我们还在寻找资深内容运营。







{kind=link}