|
2017-1-17 来源:燕山大学车辆与能源学 作者:李昊 孔祥东 艾超
摘要:以风力发电机组变桨距载荷模拟系统为研究对象,针对变桨距模拟过程中桨叶主动调整对加载系统产生的多余力矩展开研究。分析多余力矩产生的主要原因,构建变桨距载荷模拟系统对耦数学模型,提出一种改进辅助同步补偿的控制方法,并进行仿真分析和实验研究。实验结果表明,该控制方法对变桨距载荷模拟过程中多余力矩有明显的抑制效果,可提高变桨距载荷模拟系统的加载精度,为变桨距控制实验研究奠定基础。
关键词:变桨距载荷模拟;多余力矩;阀控液压马达;风力发电机
0.引言
目前越来越多的大型风力发电机组采用独立变桨距技术来减少载荷波动,变桨过程更加频繁。针对变桨过程中载荷特性的研究已成为变桨距控制技术研究领域的重点n·“。采用半物理仿真实验方法对桨叶的变桨距载荷进行模拟是一种非常有效的手段口1。在模拟过程中,既要求加载系统能够准确模拟变桨距过程中的桨叶载荷变化,又要求其能够跟随桨叶的桨距角变化进行转动。因此,在变桨距负载模拟过程中,变桨距系统的主动运动会对加载系统产生多余力矩的干扰作用H’5]。这种干扰严重影响了变桨距载荷模拟器的加载精度,使得系统的稳定性变差,导致加载系统无法正确加载。目前国内外学者对多余力矩的抑制方法开展了诸多研究。克服多余力矩的方法分为两大类:一类是结构补偿方法;另一类是控制补偿方法。结构补偿方法虽然稳定性好,但成本高,灵活性差;控制补偿方法成本低,调节和控制较方便,是一种常用的补偿方法№'“。针对变桨距载荷模拟过程中多余力矩的产生机理以及系统的特性,本文提出一种改进辅助同步补偿控制方法,对载荷模拟过程中的多余力矩进行抑制,用以保证载荷模拟系统与变桨距位置控制系统具有一定的鲁棒性和较高的同步精度。
1.变桨距载荷模拟系统
1.1载荷模拟系统数学模型
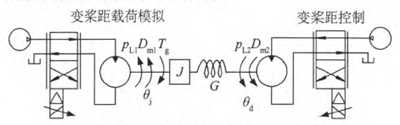
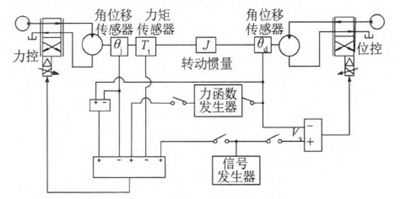
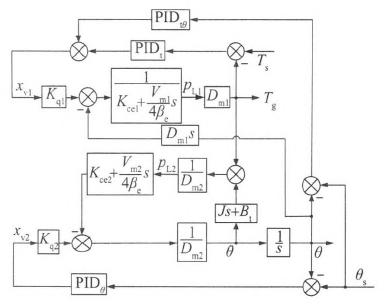
变桨距载荷模拟系统的工作原理如图1所示,系统由变桨距载荷加载系统和变桨距控制系统两部分组成。图1中刚性连接左侧为加载系统,即力矩伺服控制系统,采用阀控液压马达来模拟变桨距过程中桨叶所受的负载力矩;右侧为桨距角位置伺服控制系统。在变桨距载荷模拟系统工作过程中,变桨距控制端(承载系统)和变桨距载荷模拟系统(加载系统)分别跟踪桨距角位置指令信号和变桨距载荷力矩指令信号,利用角位移传感器和扭矩传感器测量信号实现闭环控制。
图1 变桨距载荷模拟系统工作原理
对图1的加载系统进行分析,有以下4个基本方程:
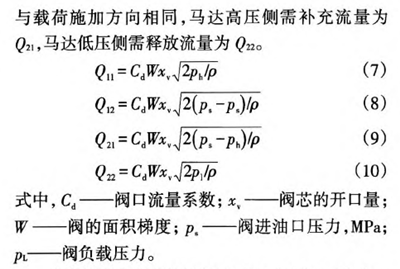
1)加载伺服阀的线性化流量方程

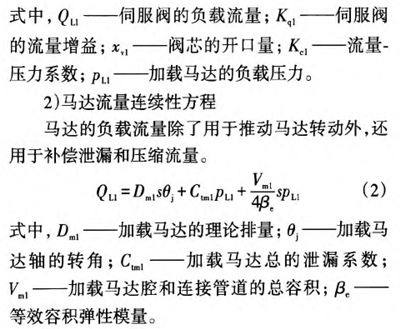
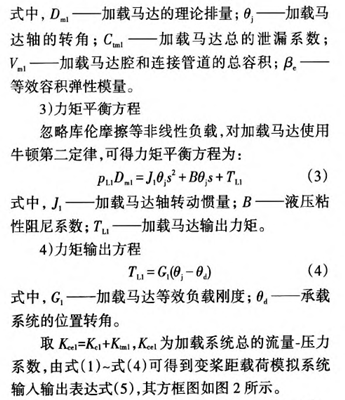
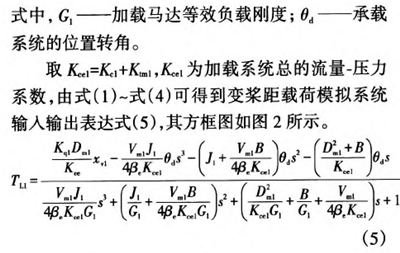
图2变桨距载荷模拟系统输出力矩模型
1.2系统多余力矩分析
加载系统与变桨距系统通过传动轴刚性连接在一起,这就要求加载系统在跟踪变桨载荷信号的同时能够跟踪桨距角位置的变化。但是,由于变桨距控制端的主动位置运动会对加载系统产生强干扰,出现多余力矩。对于变桨距载荷加载动力机构而言,从式(5)可看出,分子中第一项为加载系统为保证加载力矩所需的流量,后面几项是和变桨距位置相关的量,也即多余力矩项,如式(6)所示。
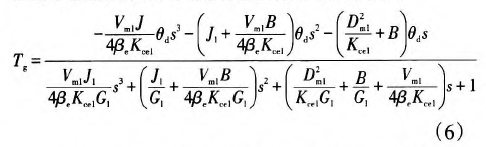
由式(6)可看出,多余力矩与变桨距系统的转角速度项、转角加速度项以及转角加加速度项均有关,是由于变桨距端液压马达做转角位置控制时的动态过程引起的。变桨距端的变桨位置控制动态过程通过传动轴作用于加载马达侧,在加载马达两腔产生强迫流量,形成多余力矩。尤其在变桨距位置控制端进行启动、换向、加速和减速等工况时多余力矩的表现就会更为明显。
2.多余力矩抑制控制模型
2.1辅助同步补偿控制
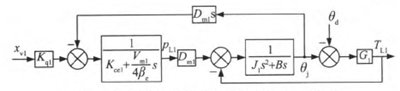
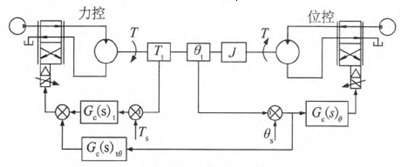
在变桨距载荷模拟系统数学模型中将液压马达输出轴自身的转动惯量进行简化,只考虑传动轴等效负载惯量及刚度,建立载荷模拟系统耦合控制模型,如图3所示。
如图3所示,传统辅助同步补偿方法是在加载系统中增加一个位置补偿环节,将变桨距控制端的液压马达位置控制信号引入到加载系统,使变桨载荷加载端液压马达能主动与变桨距控制端马达一起运动,从而达到消除多余力的目的。例如,当加载主控信号为零(K=0)时,希望加载马达输出的力矩为零。要做到这一点,就需加载侧马达不仅能输出给定的负载信号,还要能及时跟踪变桨距马达的主动位置控制运动。由于多余力矩主要来自于变桨距马达控制过程干扰,如果在加载系统的控制中补偿这种扰动量,就能达到削减多余力矩的目的,这就是控制器补偿思路。如图4所示。
图4辅助同步补偿原理
辅助同步补偿控制方法实现了跟踪运动和载荷施加两种功能,加入了所要求的位置内环;承载对象和力控系统运动状态的同步差信号也起到补偿作用。同时该方案中引入两个角位移检测,进一步保证了同步精度。
2.2改进辅助同步补偿控制
采用辅助同步补偿方法对抑制多余力矩可提高系统加载精度及频宽,但系统之间仍存在耦合,位置补偿环节与加载系统相互作用,限制系统性能指标的进一步提升。本文在辅助同步补偿方法的基础上,提出一种改进辅助同步补偿方案,对式(6)分子中各项进行消除,达到进一步抑制多余力矩的目的。
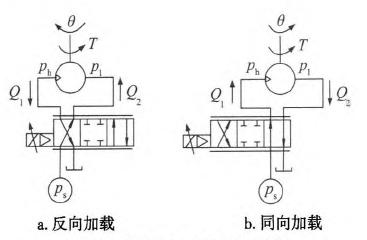
同步补偿控制是在变桨距载荷模拟控制回路中并联一个位置控制回路,将变桨距载荷加载分为两个基本步骤:首先让载荷模拟系统跟随桨距角位置控制系统运动;然后加载载荷谱。图5为变桨距载荷模拟系统原理简图。
在图5a中,马达转角与载荷施加方向相反,需将马达高压侧多余流量释放出来,该流量记为Q11,马达低压侧需补充的流量为Q12.图5b中,马达转角
图5载荷模拟系统原理简图
变桨距载荷模拟过程中加载力矩较大,这时P。的值与P。的值非常接近。当阀芯位移血。相同时,加载马达与位置控制马达的流量Q。.与Q:。的值相差较大,产生了较大的非线性,对变桨距载荷模拟系统的响应特性也随之产生了较大影响。而且当桨距角调整方向不同时,系统的响应特性也不同,系统具有较大的不对称性。
变桨距载荷模拟系统中,对变桨距载荷力矩动态响应的要求不高。为保证变桨载荷模拟系统的频宽,在搭建模拟平台过程中使得加载端与承载端的传动轴具有较高的刚度,使得变桨距载荷加载马达与桨距角位置控制马达基本达到机械同步状态。基于这种考虑,本文提出一种改进辅助同步补偿控制方法,原理如图6所示。
图6改进辅助同步补偿原理
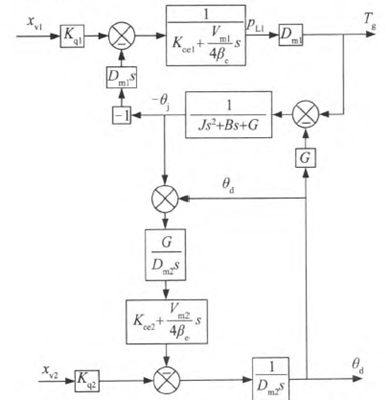
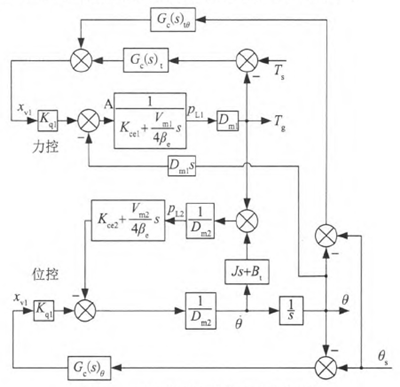
由图6可看出,采用改进辅助同步补偿原理可简化同步补偿控制方法,削弱位置补偿环节与加载系统之间的耦合,适用于变桨距载荷的模拟。在变桨载荷模拟过程中,加载系统与桨距角位置控制系统之间会存在非同步响应问题,且该非同步工作点是不固定的,会随加载过程的变化而改变。为减轻这一影响,本文在搭建变桨距载荷模拟平台时,选用低速大扭矩液压马达,但多余力矩仍不能完全消除。为进一步抑制多余力矩,将辅助同步补偿原理中的位置补偿进行改进,在加载控制端并联位置控制回路,并对位置控制单独设置控制器,从而实现变桨载荷模拟与桨距角位置控制具有较高的同步精度,且在不同的加载工作点处均具有一定的鲁棒性。改进辅助同步补偿控制方法如图7所示。
图7改进辅助同步补偿控制框图
在图7中,若需要完全抑制多余力矩的产生,则需要控制比较点A处的变化为零,使得瓦=0。此时变桨载荷模拟端马达与桨距角位置控制端马达完全同步转动。设由桨距角位置变化而产生的多余流量为Q。,由加载系统并联的位置控制回路给出阀芯位移调整值对应的补偿流量记为Q。,则:

桨距角位置控制系统在外负载力矩增量为零时,闭环控制系统前向通道传递函数为:
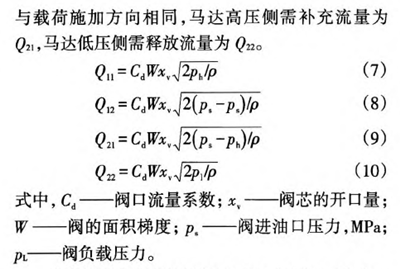
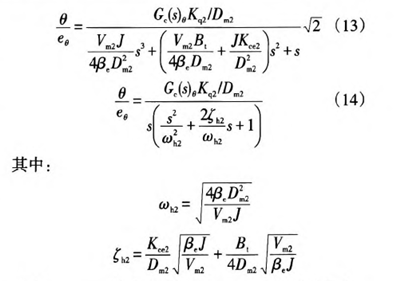
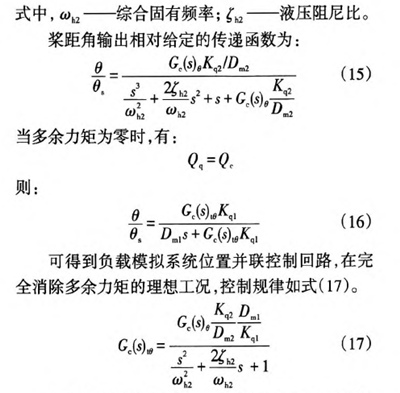
图8简化改进辅助同步补偿控制原理图
3.仿真与实验分析
3.1仿真分析
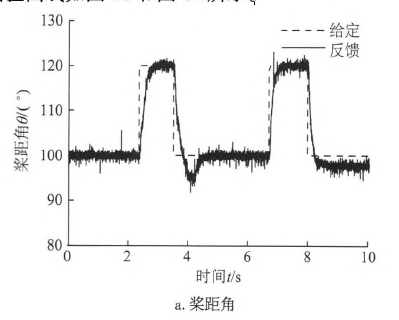
在给定桨距角20。阶跃变化,力矩给定为1000 Nm条件下,对多余力矩进行未补偿以及采用改进辅助同步补偿方法对多余力矩抑制仿真分析,仿真结果如图9所示。
图9桨距角阶跃给定条件下的多余力矩抑制仿真曲线
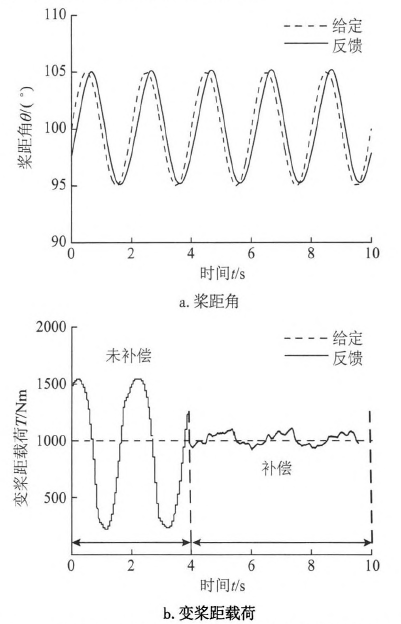
在给定桨距角幅值5。,频率0.5 Hz变化,力矩给定为1000 Nm条件下,对多余力矩进行未补偿以及采用改进辅助同步补偿方法对多余力矩抑制仿真分析,仿真结果如图10所示。
图10桨距角正弦给定条件下的多余力矩抑制仿真曲线
3.2实验分析
在实验室搭建试验平台,采用两台低速大扭矩摆线液压马达分别作为桨距角控制马达和变桨力矩模拟马达。针对以上仿真结果进行实验研究,其实验曲线如图11和图12所示。
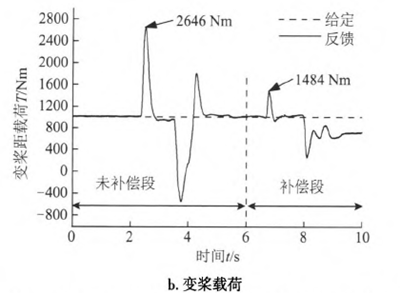
图1l 桨距角阶跃给定条件下的多余力矩抑制实验曲线
图12桨距角正弦给定条件下的多余力矩抑制实验曲线
通过仿真和实验分析可看出,采用改进辅助同步补偿的方法对多余力矩有很好的抑制效果,消除多余力矩可达到75%以上,且该方法在动态位置扰动时也适用,提高了变桨距载荷模拟系统的加载精度。
4.结论
以液压型风力发电机组阀控液压马达为研究对象,建立变桨距系统半物理仿真实验台,采用理论分析和实验研究的方法,研究变桨距载荷模拟统多余力矩补偿控制技术,得到以下结论:1)采用改进辅助同步补偿的方法,避免了引入高阶微分环节和实际物理系统转速信号的准确测量问题,能准确、稳定计算出载荷模拟系统所需要的阀口开度。2)通过仿真与实验分析,该方法能有效抑制变桨距载荷模拟系统中产生的多余力矩,提高了载模拟系统的控制精度,与传统的控制补偿方法相比较,更简单适用,为大型风力发电机组变桨距控制奠定了研究基础。
|  |联系我们|法律声明|用户协议|AMT咨询|商务合作|会员入驻|积分充值|积分商城|积分奖励规则|TradEx全球购|加入QQ技术群|添加企业微信|加入微信技术群|文章投稿|
世界先进制造技术论坛™(简称AMT™, 制造知网™)
( 沪ICP备12020441号-3 )
|联系我们|法律声明|用户协议|AMT咨询|商务合作|会员入驻|积分充值|积分商城|积分奖励规则|TradEx全球购|加入QQ技术群|添加企业微信|加入微信技术群|文章投稿|
世界先进制造技术论坛™(简称AMT™, 制造知网™)
( 沪ICP备12020441号-3 )







 发表于 2017-11-16 14:03:42
发表于 2017-11-16 14:03:42




{kind=link}