|
2017-1-22 来源:北京信息科技大学机电工程学院 作者:马彬, 陈勇,,龚国庆
摘要:针对四轮驱动电动车辆载荷转移导致路面识别及驱动防滑控制精度降低的问题,通过建立转矩、转角加速度与路面的对应关系模糊规则.采用查表的方式实现了路面的精确识别。与标准滑移率曲线进行对比实现了最佳滑移率及最佳摩擦系数的判定。结合车辆6自由度非线性模型、轮胎模型及电机电枢模型,开发了模糊路面识别的四轮驱动电动车驱动防滑模糊控制策略。在MATLAB/Simulink仿真环境下对轮胎滑移率跟随状态进行了仿真。结果表明,所开发的基于模糊路面识别的电动车辆驱动防滑模糊控制策略具有良好的控制效果,提高了车辆行驶稳定性和动力性。
关键词:四轮驱动电动车;路面识别;驱动防滑;模糊控制;极限工况
1.引言
四轮独立驱动电动车四个驱动电机独立可控,转矩和转速易于获得,电机响应快,转矩可精确控制,因此在驱动防滑控制方面相对于传统汽车有其独特优势。四轮驱动电动车驱动防滑控制技术是在准确识别当前路面及其最优滑转率的基础上,通过实时控制驱动转矩使四个驱动轮的滑转率保持在最优滑转率附近,从而提高车辆的动力性和行驶稳定性。
研究表明,在较大载荷转移工况下,整车驱动防滑控制对路面识别精度具有较高要求。先前对路面识别的研究,多为根据滑移率的变化率特性01-2]进行路面识别,或通过对驱动轴滑转率、纵向附着系数与标准曲线进行类比,利用模糊逻辑估计当前最优滑转率”。J,也有以电机转矩¨1为检测对象或通过算法直接对路面进行识别旧。7J,然而,这些路面识别及驱动防滑控制策略的精度能够满足常规工况,但在存在较大载荷转移的极限工况下控制效果不佳。
为了在较低路面附着系数下能够快速、准确估计出路面附着系数和最优滑转率,去除载荷转移对整车驱动防滑控制精度的影响,提出一种基于车轮转矩和车轮旋转角速度的路面模糊路面识别方法;在此基础上开发考虑载荷转移特性的四轮驱动电动车辆驱动防滑模糊控制策略,使车辆在极限工况下仍能获得最佳的路面识别效果及滑移率控制,从而保证车辆的动力性和稳定性,为四轮驱动电动车辆底盘控制策略的开发提供理论基础。
2.整车机电系统仿真模型
2.1车辆模型
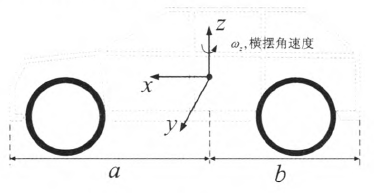
根据驱动防滑整车控制的要求,建立6自由度整车模型,包括车辆纵向,横摆运动以及四个车轮的转动模型。取地面直线标线并指向车辆运动的方向为x轴的正方向,沿x轴左侧并与之垂直的方向为Y轴的正方向,垂直地面向上的方向为z轴的正方向。车辆坐标系如图1所示。
图1 自由度车辆模型

2.2轮胎模型
由于“魔术公式”能够描述轮胎所有力学特性,拟合参数少并且能够从实际轮胎试验获得,模拟精度较高,因而选取魔术公式轮胎公式作为轮胎模型一j。建模时考虑了垂向载荷变化的影响,因此需选用含有垂向载荷特征的“魔术公式”,表达式为

2.3垂向载荷模型
充分考虑车辆运动过程中载荷转移对载荷变化的影响,所建立的右前、左前轮胎垂向载荷模型为

3.模糊路面识别原理及滑移率判定
3.1 模糊路面识别规则的确定
极限工况下,垂向载荷出现较大波动,导致路面识别准确度大幅降低。研究表明,去除载荷影响最有效的方式为通过检测车轮转矩-5 o及在当前驱动力矩下的车轮角加速度来判定当前路面,因而将驱动转矩和车轮角角速度作为路面判定的依据。
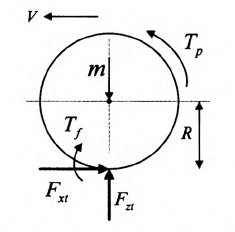
根据车轮在驱动工况下的动力学特性以及纵向平面运动特性,简化后的驱动工况下车轮旋转动力学模型如图2所示。
图2 车轮转动力学示意图


由于式(9)中并不含有与速度相关的参数,因而此路面识别方式不受车辆速度影响,在不同速度下均具有较高精度。
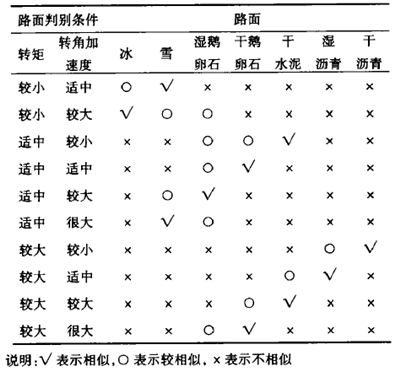
在对路面进行识别时,结合轮毂电机转矩、转速及转动加速度易获取的特点,通过经验实验,获取不同路况、转矩及转角加速度的对应关系。所建立的转矩、转角加速度与路面对应关系准则如表1所示。
表1 转矩、转角加速度与路面对应关系准则
2.2 路面最佳滑移率及摩擦系数确定
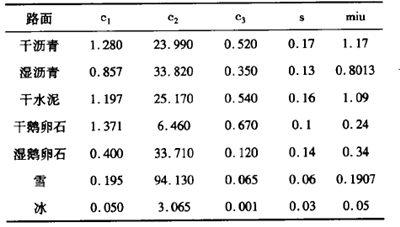
对路面进行识别之后,需确定当前路的面最佳滑移率。在路面识别方面,典型路面半经验弘一J数学模型[83在汽车动力学中广泛应用。因此,利用标准路面弘一s数学模型计算出当前路面利用附着系数和最佳滑移率。该模型包含参数c。、c:及c,的滑动摩擦因数模型,其描述如式(9)所示,不同路面条件下的拟合参数H1见表2。

表2不同路面条件滑动摩擦因数取值
3.5整车模糊控制器模型
由于模糊控制对不明确的系统的控制具有绝对的优势,因此在对路面进行识别时,选用经典的模糊控制方法开发驱动防滑控制策略。利用传感器测得车轮角速度信号,经过实时计算获得车轮的转角加速度信息,通过路面识别模糊规则,经过模糊化、逻辑推理和清晰化过程判定当前路面状况,判定流程如图3所示。
图3路面识别及最佳滑移率、摩擦系数判定流程图
建立模糊控制规则时,主要控制车轮滑移率。为兼顾控制效果,将实际滑移率与标准滑移率的误差e和误差变化率de作为模糊控制器的输入,控制模型的输出为电机电压u。模糊控制器的关键为论域与基本论域的选取,对于论域与基本域的选取,为控制精准,滑移率误差的基本论域选取为[一0.1,0.1],同时为了控制效果更佳,论域的选取为{一6,一4,一2,0,2,4,6}。
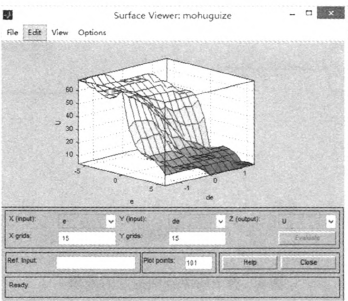
对滑移率误差变化率的论域与基本域的选取,设置滑移率误差变化率的基本论域为[一20,20],论域为{-1.5,一1,一0.5,0,0.5,1,1.5}。模糊控制器的输出为直流电机的控制电压,输出范围为[0 72]。经过反复验证,最终获得的模糊推理规则如图4所示。
4.仿真结果与分析
4.1仿真条件的设置
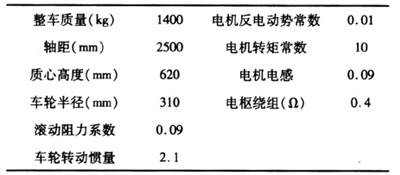
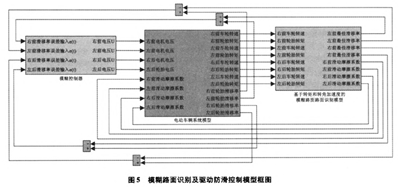
在Matlab/Simulink环境下建立仿真平台,对开路面模糊控制效果进行分析验证。整车控制模型框图如图5所示,仿真参数如表3所示。
表3整车及轮毂电机系统参数
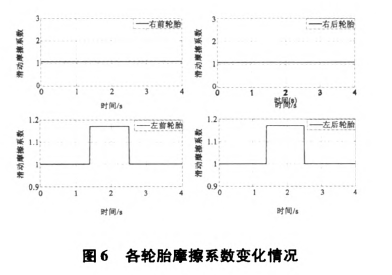
仿真分析时,设置车辆现在良好路面上起步加速,经过1.5s后,右侧车轮经过时间为ls的附着系数较高路面,路况变化情况如图6所示。
图4模糊逻辑推理规

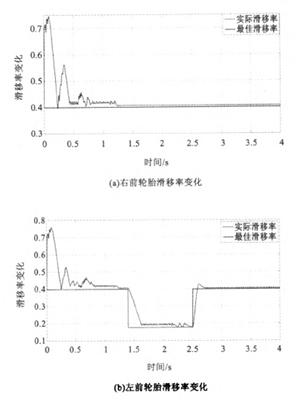
图8单个轮胎施加控制的效果
控制效果明显好转,其实际滑移率被控制在最佳滑移率附近;在路面发生阶跃变化时,其真实滑移率仍能很好的跟随最佳滑移率。
由图9中的c)和d)可见,由于受载荷转移的影响,后轮载荷加大,其控制效果明显好转。控制器能够使实际滑移率实现对最佳滑移率的跟随,几乎无控制误差。对比分析图8和图9的单个轮胎及整车滑移率跟随效果可知,控制效果在不考虑载荷转移时能够获得极佳的控制效果基于模糊控制策略的路面识别具有一定的可靠性。同时,在极限工况下,后轮能够很好的保持滑移率的跟随,前轮由于载荷转移的影响,其控制效果出现一定的延迟,但是整体仍能满足驱动防滑控制的要求,因而说明本文提出的道路估算算法稳定可靠,所开发的考虑载荷特性的驱动防滑模糊控制算法在极限工况下能够保证最佳控制效果。
6.结语
提出了基于车轮转矩和转角加速度的模糊路面识别方法。结合6自由度车辆模型开发了基于路面识别的考虑载荷变化特性的四轮驱动电动车辆驱动防滑模糊控制策略,在MATLAB/Simulink仿真环境下对比分析了单个车轮及整车控制效果。仿真结果表明,所提出的路面识别具有较高精度,所开发的四轮驱动电动车辆驱动防滑控制策略,对单轮及整车均具有较好的控制效果。研究为极限工况车辆驱动防滑提供理论基础,对电动车辆底盘集成控制研究具有重要意义。
图9施加控制后的滑移率变化
|  |联系我们|法律声明|用户协议|AMT咨询|商务合作|会员入驻|积分充值|积分商城|积分奖励规则|TradEx全球购|加入QQ技术群|添加企业微信|加入微信技术群|文章投稿|手机版|
世界先进制造技术论坛™(简称AMT™, 制造知网™)
( 沪ICP备12020441号-3 )
|联系我们|法律声明|用户协议|AMT咨询|商务合作|会员入驻|积分充值|积分商城|积分奖励规则|TradEx全球购|加入QQ技术群|添加企业微信|加入微信技术群|文章投稿|手机版|
世界先进制造技术论坛™(简称AMT™, 制造知网™)
( 沪ICP备12020441号-3 )







 发表于 2017-11-20 14:49:07
发表于 2017-11-20 14:49:07






{kind=link}