|
来源:中航工业北京航空制造工程研究所 作者:程 涛
摘要: 对大飞机数字化装配中的数控定位器进行技术研究,并对数控定位器进行工况状态下进行有限元分析,通过ANSYS 有限元软件分析定位器的位移,为数控定位器设计提供理论依据,从而指导数控定位器的优化及实际应用。
关键词: 数控定位器、数字化装配、有限元分析、ANSYS
0.引言
大型飞机总装线使用固定对接平台以保证相关部件准确地定位在装配站位上。目前多采用的是自动对接平台系统,此对接系统解决了传统对接平台耗费时间长和费用高等问题,使装配质量和效率得到提高,并节省相关的装配费用。数控定位器是一种3 个方向相互垂直运动、定位精度高、工作可靠的模块化单元,主要由底座( 工装移动平台)、移动箱体、立柱、升降箱体、夹紧机构等组成。其中X、Y、Z 方向的运动由伺服电机、减速器、滚珠丝杠传动和光栅尺反馈构成全闭环控制。
本论文对大飞机装配中数控定位器进行工况状态下进行有限元分析,通过ANSYS 有限元软件,分析出定位器的变形。根据此数据还可对与数控定位器相关的部件进行优化设计,提高定位器承载的能力,使数控定位器满足大飞机装配的定位调资要求,为数控定位器的设计提供了参考。
1、数控定位器的设计
1.1数控定位器三维模型的建立、定义材料及网格划分
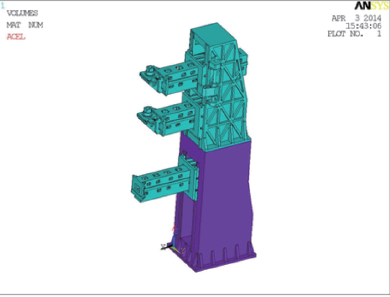
通过CATIA 软件建立三维模型后, 结合ANSYS 有限元分析软件,并做相应的结构简化,以减少有限元分析计算时间,提高精确度。三维模型如图1 所示。
图1 数控定位器三维模型图
弹性模量的不同造成变形状态差别。不同材料的屈服及强度极限不同,因此对应力计算结果的评价标准不同,该机床工作力很小,工作状态下应力水平只有几兆帕,远小于普通金属材料的屈服极限。
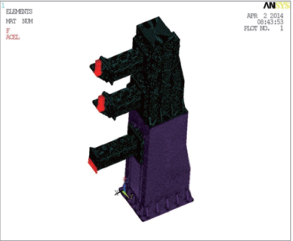
针对导入三维模型的结构特点以及实体模型网格划分的要求,数控定位器三维模型网格采用四面体单元Solid45 进行划分。
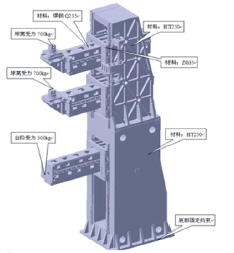
图2 数控定位器模型材料选择
图3 数控定位器模型网格划分
1.2约束和载荷
针对数控定位器的工况和特点,施加的约束包括: 在底部施加全约束。载荷包括: 在两处球窝施加载荷6860N(700kg),同时在台阶处施加载荷2940N(300kg)。
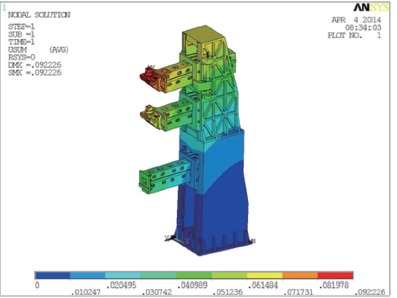
图4 自重下的变形
1.3进行求解运算
运用ANSYS 解法进行求解。操作步骤为:MainMenu > Solution > Solve > Current Ls。并得出ANSYS 有限元分析变形结果如图4、图5、图6、图7、图8、图9、图10 所示。
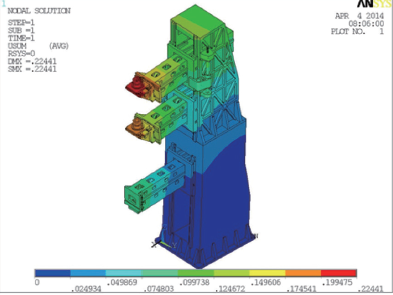
图5 工作载荷下的变形
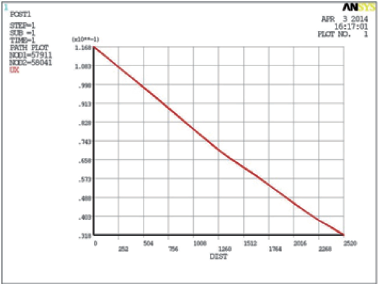
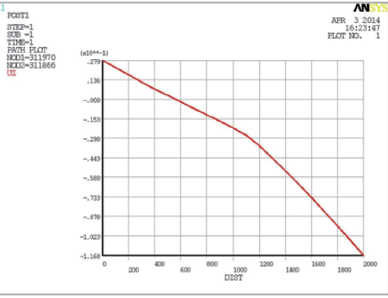
图6 上立柱导轨的变形曲线(从上到下)
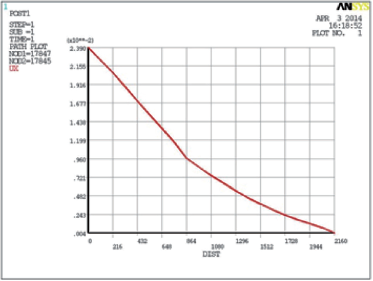
图7 下立柱导轨的变形曲线(从上到下)
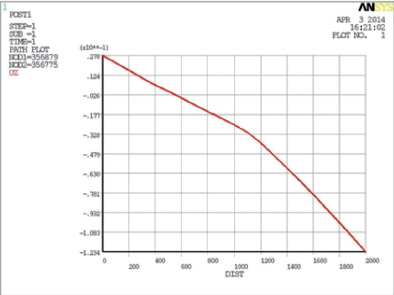
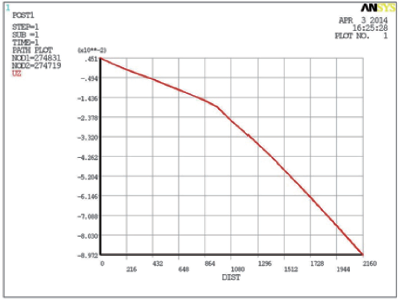
图8 上滑枕导轨的弯曲变形曲线(从后到前)
图9 中滑枕导轨的弯曲变形曲线(从后到前)
图10 下滑枕导轨的弯曲变形曲线(从后到前)
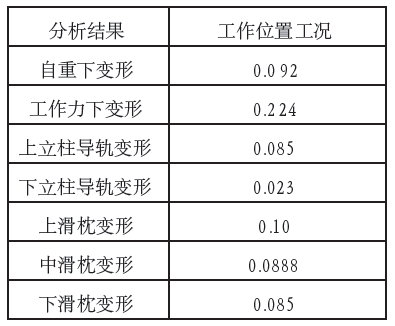
总结分析结果如表1 所示。
2、结论
运用ANSYS 有限元分析软件,可以对数控
表1 计算结果综合信息一览表
定位器的结构进行分析,并对数控定位器的立柱、滑枕等尺寸进行优化,对产品的结构设计及优化起到重要的作用。
1)自重下设备最大变形发生在极限位置工况,变形0.092mm,最大变形在顶部加工头部位。
2)载荷作用时最大变形发生在极限位置工况,设备变形0.224mm,最大变形在顶部加工头部位。
3)载荷作用时,上立柱导轨的最大弯曲量0.085mm 左右,下立柱导轨的最大弯曲量0.023mm 左右。
4)载荷作用时,滑枕导轨的最大弯曲量0.10mm 左右。
通过有限元软件,分析出定位器的变形。根据此数据还可对与数控定位器相关的部件进行优化设计,使数控定位器的结构更合理,达到大飞机装配的定位调资的要求,便于铸造,节约了成本,为数控定位器的设计提供了参考。
|  |联系我们|法律声明|用户协议|AMT咨询|商务合作|会员入驻|积分充值|积分商城|积分奖励规则|TradEx全球购|加入QQ技术群|添加企业微信|加入微信技术群|文章投稿|
世界先进制造技术论坛™(简称AMT™, 制造知网™)
( 沪ICP备12020441号-3 )
|联系我们|法律声明|用户协议|AMT咨询|商务合作|会员入驻|积分充值|积分商城|积分奖励规则|TradEx全球购|加入QQ技术群|添加企业微信|加入微信技术群|文章投稿|
世界先进制造技术论坛™(简称AMT™, 制造知网™)
( 沪ICP备12020441号-3 )







 发表于 2017-11-30 14:30:58
发表于 2017-11-30 14:30:58


{kind=link}