|
来源:南京航空航天大学 作者:徐海 王华明 杨仁国
摘要:为了研究桨叶高阶谐波变距对桨毂垂向载荷的影响,建立了基于独立桨叶控制技术的桨毂垂向载荷模型。假设桨叶刚体挥舞,采用Leishman—Beddoes(L-B)非定常气动力模型和Glauert入流模型计算旋翼气动力,求解桨叶挥舞动力学方程,计算桨毂垂向裁荷。分析桨叶施加20,30阶变距谐波后桨毂垂向载荷的变化,总结高阶变距谐波幅值、相位对桨毂垂向振动裁荷的影响规律。结果表明独立桨叶控制能有效降低直升机桨毂垂向振动载荷。
关键词:直升机旋翼;独立桨叶控制;动态失速;桨毂载荷
旋翼是直升机的主要振源,减小旋翼振动载荷是降低直升机振动水平的重要途径。早期的直升机采用了动力吸振[1]、双线摆等被动减振装置吸收旋翼的振动载荷,目前直升机振动主动控制已成为研究的热点。直升机振动主动控制技术主要有独立桨叶控制、主动后缘襟翼控制[2]、旋翼主动扭转控制口]、主动式动力吸振器以及结构响应主动控制‘41等。
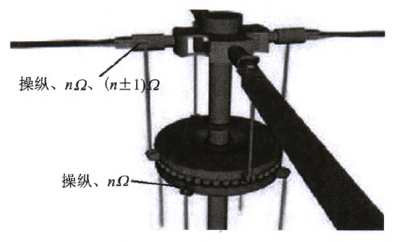
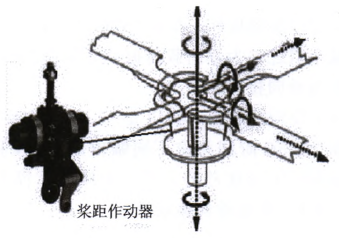
独立桨叶控制技术发展于高阶谐波控制概念。其原理是将液压作动器对自动倾斜器不旋转环施加nO激励,通过对桨叶的高阶谐波主动控制可以降低旋翼系统通过频率对应的振动载荷分量口],如图1所示。研究者在高阶谐波控制基础上提出的独立桨叶控制技术,即用作动器替代自动倾斜器和变距拉杆,独立地对每片桨叶的桨距进行高阶谐波控制,如图2所示。独立桨叶控制不仅可以替代自动倾斜器对桨叶进行总距和周期变距操纵,还可以根据需要,单独对每片桨叶施加高阶谐波变距操纵,以改善旋翼气动特性,减小桨毂振动载荷。
图1高阶谐波控制
图2独立桨叶控制
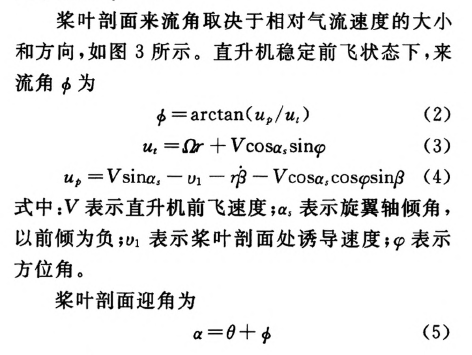
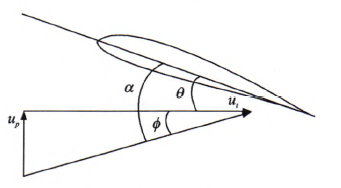
图3桨叶剖面迎角
1.2 Leishman-Beddoes动态失速模型
本文二维气动力模型采用了L-B模型。该模型在考虑动态失速造成的气动载荷响应延迟效应的同时,将气动载荷系数分为附着流、后缘分离和前缘分离3个部分计算,计入气流的压缩性、翼型后缘分离造成的升力损失以及前缘脱体涡造成的气动载荷变化,并与实验经验值进行对比。
1.3 Glauert入流模型
由于直升机旋翼气动流场复杂,人流和尾迹模型一直是旋翼空气动力学研究领域中的难题。本文采用了Glauert人流模型,该模型假设诱导人流
1.4桨叶挥舞动力学方程及求解
加入高阶变距控制后,从挥舞运动方程得到解析解比较困难,本文求解挥舞响应采用文献[15]中的经验方法,该方法给出的是一种递推形式的数值解。
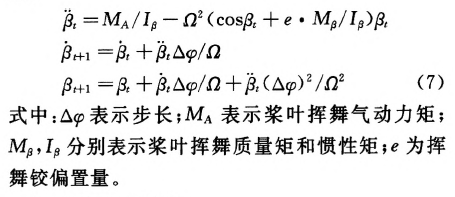
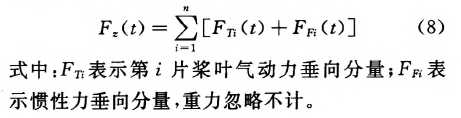
1.5桨毂垂向载荷
直升机前飞时,桨毂垂向振动载荷主要来源于桨叶挥舞方向。桨叶摆振运动也会在旋转平面内产生振动载荷,由于桨叶挥舞角较小,桨叶摆振运动引起的振动载荷在桨毂垂向的分量很小。因此,本文只考虑桨叶挥舞运动引起的桨毂垂向载荷。桨毂垂向载荷由各片桨叶桨根垂向力合成,本文建立的是沿方位角时域计算模型。
2.算例与结果分析
2.1算例模型参数
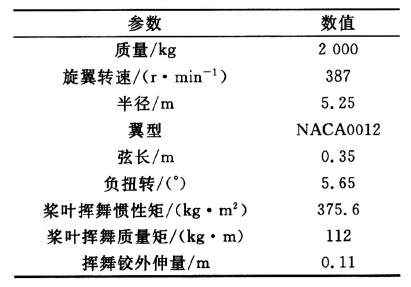
表1给出了算例模型的主要参数。
表1算例主要参数
2.2高阶谐波幅值对桨毂垂向载荷的影响
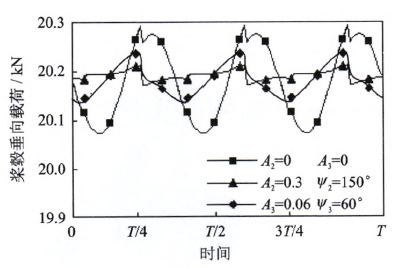
图4反应的是旋翼旋转一周时间(T)历程内,没有高阶变距和施加高阶变距情况下,桨毂垂向载荷的变化曲线。从图中可以看出,独立桨叶高阶谐波变距能有效地降低桨毂垂向振动载荷。
图4不同状态旋翼旋转一周桨毂垂向载荷曲线
本文以旋翼旋转一周内,桨毂垂向载荷的最大值与最小值之差为垂向载荷振动幅值,桨毂垂向载荷均值为垂向拉力。
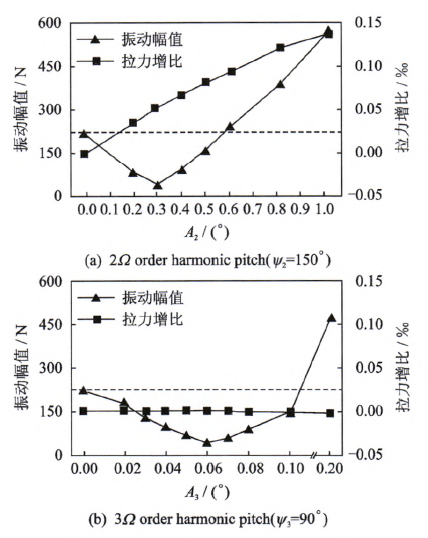
图5反应的是直升机以肛一0.14稳定前飞,分别施加20,30阶同相位不同幅值谐波时,垂向振动幅值和拉力变化趋势。图中虚线表示没有施加高阶变距时,桨毂垂向振动幅值。
图5 高阶谐波幅值对桨毂垂向载荷影响
从图中可以看出,20阶谐波对桨盘拉力有影响,但是影响很小。3c2阶谐波对桨盘拉力影响几乎为零。但施加高阶谐波后,桨毂垂向振动载荷变化明显。从图中还可以看出,施加20阶谐波幅值为0.3。时,桨毂垂向振动载荷最小,在合适的相位条件下,桨毂振动幅值可减小80%。随着谐波幅值减小,振动水平越来越接近不施加高阶谐波水平,而随着谐波幅值的增大,振动幅值越来越大,甚至大幅超过没有高阶谐波的水平。30阶谐波规律与2n阶谐波类似,不同的是30阶谐波减振最有效幅值是0.06。,小于20阶谐波。总体来看,谐波幅值较大时,一方面激励器难以实现,另一方面高阶谐波变成了振动激励,并不能达到降低振动的目的;当谐波幅值太小时,高阶谐波作用弱化,减振效果也随之减弱。
2.3 高阶谐波相位对桨毂垂向载荷的影响
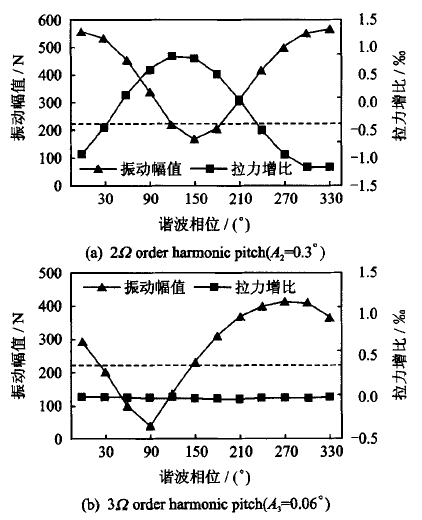
图6反应的是直升机以口一0.14稳定前飞,分别施加20,30阶固定幅值不同相位谐波时,桨毂垂向振动幅值和拉力变化趋势。图中虚线含义同图5。
图6 高阶谐波相位对浆毂垂向载荷影响
从图中可以看出,2.f2,3;2阶谐波相位对桨毂垂向拉力影响很小,可以忽略不计。但谐波相位对桨毂垂向载荷影响很大。由图可知,20阶谐波相位为150。时,桨毂垂向振动大幅降低,但随着相位的变化,振幅迅速增大。3n阶谐波有相似规律,其相位为90。时减振效果最明显。从图中还可见,最大、最小振幅对应相位相差180。。这是因为:在Ns片刚体挥舞桨叶旋翼系统中,其桨毂垂向振动主要来源于各片桨叶气动力咒阶分量,要通过高阶谐波控制减小此方向振动,就需要高阶谐波相位与振动载荷相位匹配,否则不仅不能减振,还会转换成激振。需要指出的是,不同状态、不同阶次谐波所需要的相位不同。
3.结论
本文分析直升机在稳定前飞状态下,高阶变距谐波频率、幅值和相位对桨毂垂向载荷的影响,得到以下主要结论:
(1)20,30阶谐波均可大幅降低桨毂垂向振动,最大降幅能达到80%,同时对桨盘拉力影响很小。
(2)不同阶次高阶谐波要实现减振所需的谐波幅值不同,谐波幅值过小,减振效果弱,谐波幅值过大,减振转换成激振。本文算例A1=0.3。,A2=0.06。时减振效果最好。
(3)不同状态下独立桨叶控制对不同阶次谐波的相位需求不同,桨毂垂向载荷振幅对相位比较敏感,最大振幅与最小振幅对应相位相差180。。
本文采用刚体挥舞旋翼模型,研究的主要是独立桨叶控制降低气动力所引起的桨毂垂向振动,并没有考虑其对桨叶弹性振动的影响,这需要在后续研究中逐步深入。
|  |联系我们|法律声明|用户协议|AMT咨询|商务合作|会员入驻|积分充值|积分商城|积分奖励规则|TradEx全球购|加入QQ技术群|添加企业微信|加入微信技术群|文章投稿|
世界先进制造技术论坛™(简称AMT™, 制造知网™)
( 沪ICP备12020441号-3 )
|联系我们|法律声明|用户协议|AMT咨询|商务合作|会员入驻|积分充值|积分商城|积分奖励规则|TradEx全球购|加入QQ技术群|添加企业微信|加入微信技术群|文章投稿|
世界先进制造技术论坛™(简称AMT™, 制造知网™)
( 沪ICP备12020441号-3 )







 发表于 2017-11-30 14:31:22
发表于 2017-11-30 14:31:22


{kind=link}