|
来源:南京航空航天大学 作者:黄海行, 陈广东, 陈 智
摘 要 以电磁波为参照的飞行器姿态测量研究, 可弥补空间参照物缺乏, 丰富姿态测量手段。利用3 个正交电(磁) 场传感器接收电磁波三维电(磁) 信号, 测量运动平台姿态。该方法根据姿态参数估计的CRB (克拉美—罗界) 是否为有限值, 判断该环境电磁波信号能否用于运动平台姿态测量; 根据基准姿态与实时姿态互相关矩阵变化, 估计得到实时天线坐标系到基准天线坐标系的转换矩阵, 据此将实时姿态坐标系下的运动平台姿态, 转换到基准姿态坐标系下, 再转换到地理坐标系下, 完成运动平台姿态感知。电磁波信号可以为独立或相干信号, 波达方向和极化状态任意, 可不受多径效应困扰。仿真试验表明该方法稳定有效。
关键词 电磁矢量传感器; 极化状态; 波达方向; 姿态导航
0.引言
人造的和自然界的各种电磁波充斥着地球表面和太空,这些电磁波信息与接收平台姿态具有密切关联性,电磁波提供的姿态基准不受运动平台姿态及其运动影响,可以像利用地磁场指南那样利用电磁波测量运动平台姿态。国内外都研究在地球卫星导航系统接收端,利用多点接收、三角计算的方法感知姿态[1-9] ,缺点是体积大、精度低、系统复杂和速度慢,影响了该技术的推广应用。本文利用3 个正交电(磁)场传感器接收电磁波三维电(磁)信号测量运动平台姿态,可以单点测量飞行器姿态,接收信号既可以相互独立,也可以相干,信号数任意,波达方向和极化状态任意,各信号强弱任意,因此不受多径效应困扰,既可以利用主动发射电磁波信号,也可以被动接收空间分布的广播电磁波信号测量姿态,提高了系统的隐蔽性,进一步揭示了电磁波测量姿态的能力。
1.信号模型
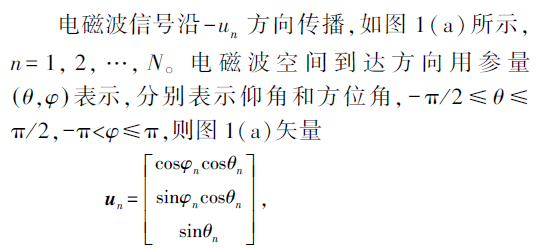
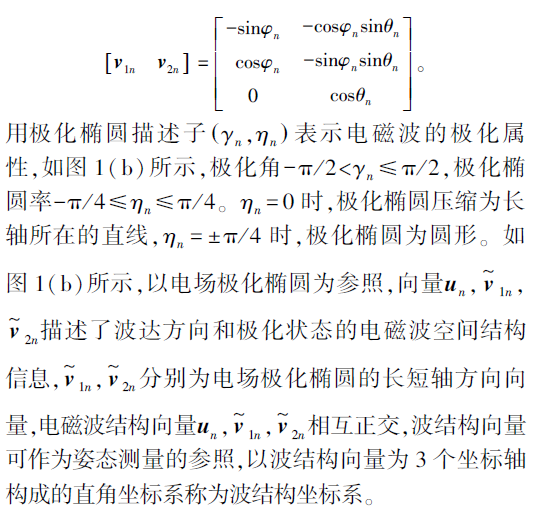
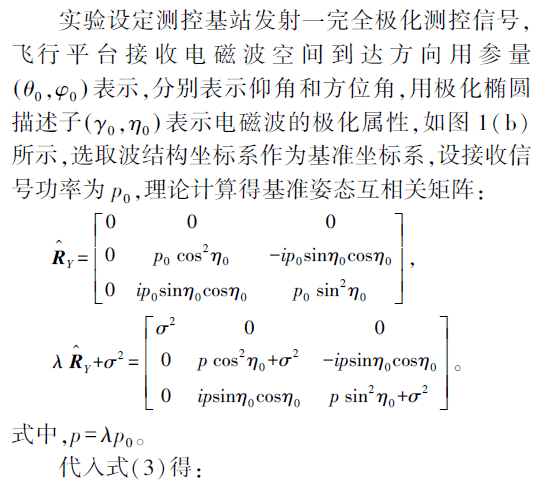
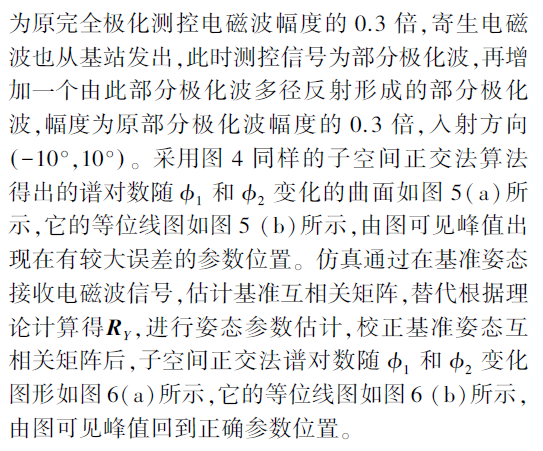
图1 极化电磁波椭圆状旋转电场波结构
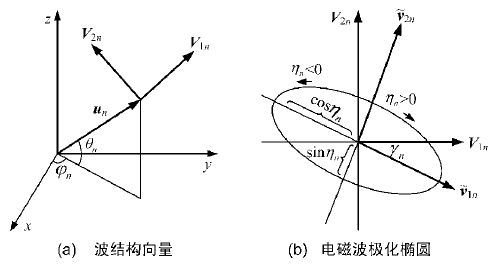
电磁矢量传感器接收单元示意图如图2 所示。全电磁矢量传感器包含3 个正交电场和3 个正交磁场接收单元。
图2 电磁矢量传感器接收单元示意
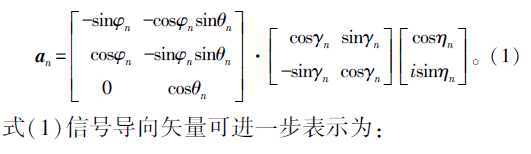
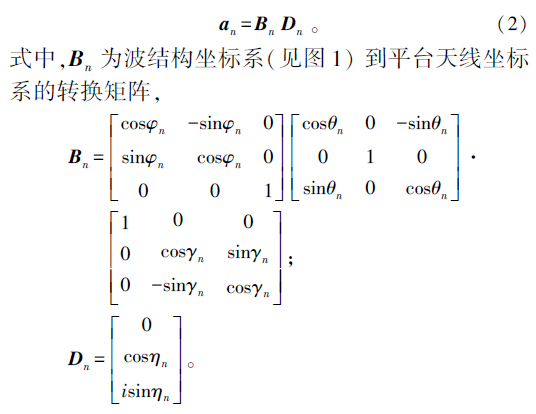
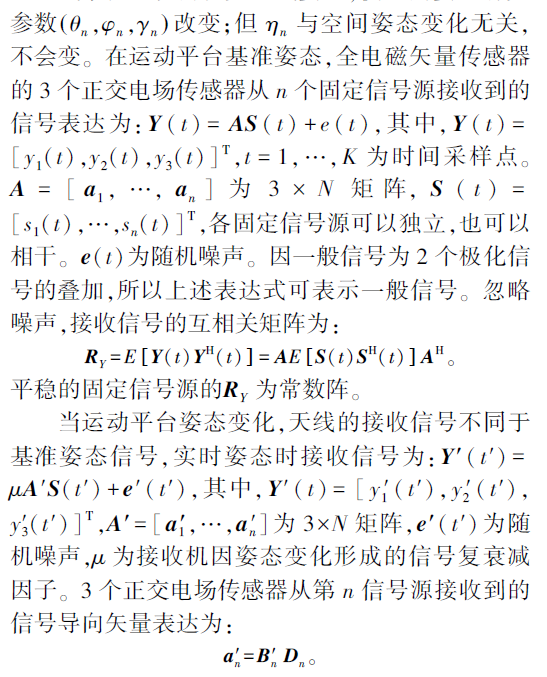
3个正交电场传感器为3 正交偶极子天线,在基准姿态从第n 信号源接收到的信号导向矢量表达为[10] :
2.姿态测量基本原理
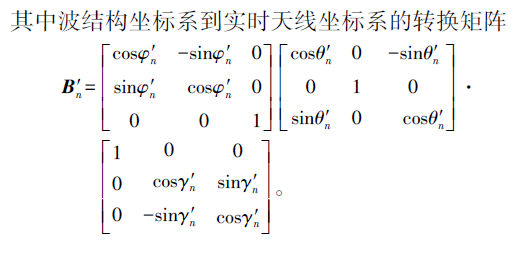
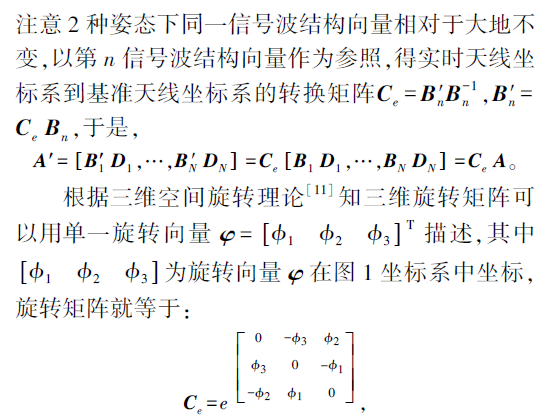
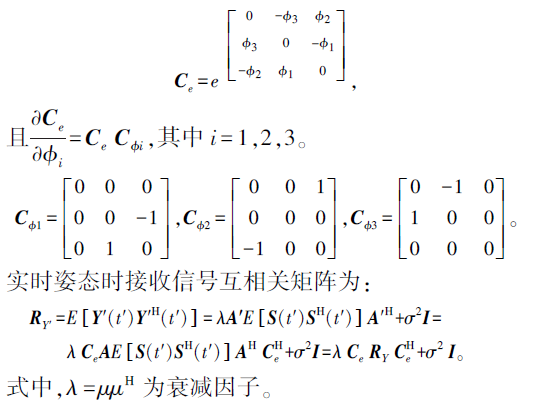
电磁矢量传感器安装在姿态变化的运动平台上,选取运动平台的某一姿态为基准姿态,标定好基准姿态平台天线坐标系与大地坐标系的关系。接收机天线平台运动会改变天线姿态,使空间姿态有关
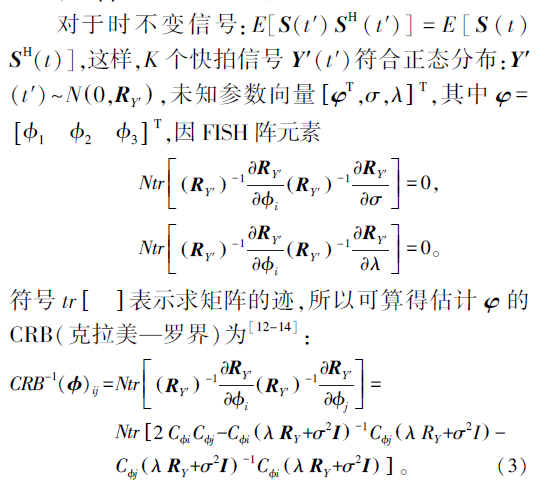
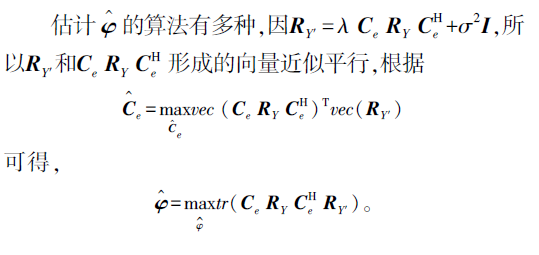
3.参数估计算法
接收信号可以为相干信号,不受多径效应困扰,信号总数N 可以为1 到无穷大,波达方向和极化状态任意,各信号强弱任意。对接收电磁波环境的要求是式(3)确定的CRB 为有限值;接收极化三维电(磁)信号互相关矩阵在解除接收姿态旋转变化影响后保持平稳,即运动平台测量姿态所处时、空、频、极化域,信号二次统计特性不变。因此本文既可以主动利用发射电磁波信号,也可以被动利用空间分布的广播电磁波信号测量姿态,提高了系统的隐蔽性。
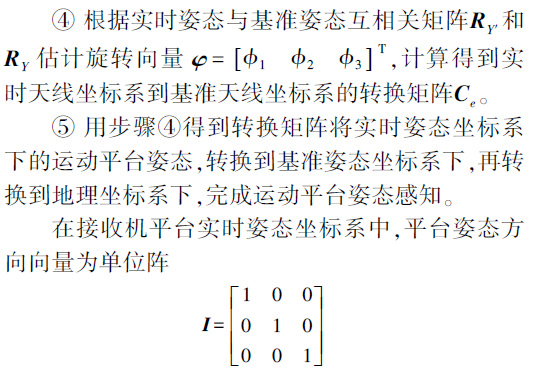
4.姿态测量具体实施步骤
姿态测量具体实施步骤如下:
① 确定运动平台基准姿态坐标系与大地坐标系转换关系。
② 在运动平台基准姿态以极化敏感的电磁矢量传感器中的3 个正交电(磁)场传感器接收电磁波信号,估计三维电(磁)信号互相关矩阵。计算姿态参数估计的CRB(克拉美—罗界)是否为有限值,判断该环境电磁波信号能否用于运动平台姿态测量。
该步骤对电(磁)极化三维特征进行学习评估,在单一接收点以极化敏感的电磁矢量传感器中的3 个正交电(磁)场传感器在基准姿态接收电磁波信号,选取时间t 中的K 个采样点采样k = 1,2,…,K次,计算估计值为:
充分采样才能获得精确的估计值,对于主动发射的电磁波,也可以通过理论计算估计R^ Y 。
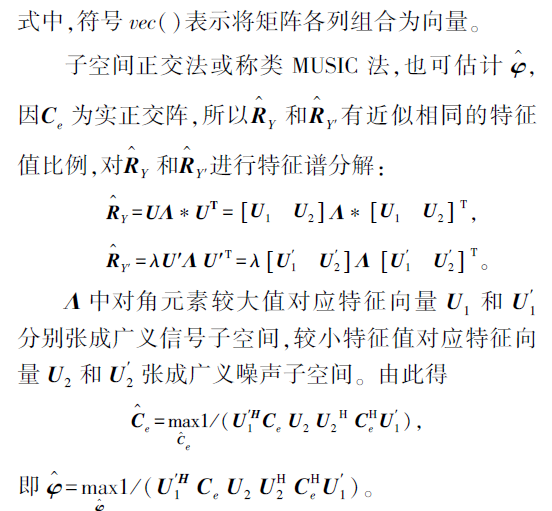
③ 在运动平台实时姿态以极化敏感的电磁矢量传感器中的3 个正交电(磁)场传感器接收电磁波信号,计算估计三维电(磁)信号互相关矩阵。对实时姿态和基准姿态互相关矩阵RY′和RY ,进行特征植分解,根据各自特征值比例是否近似相等,初略判断该环境电磁波信号是否平稳。
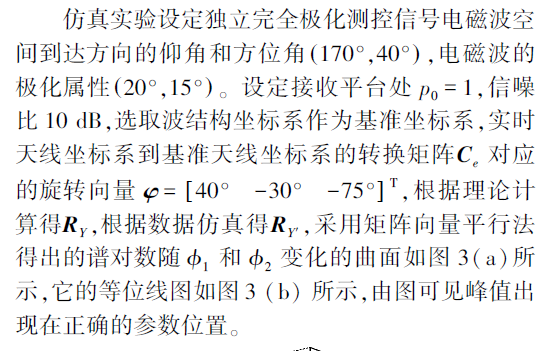
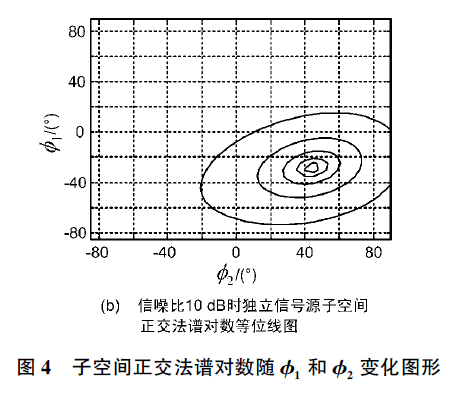
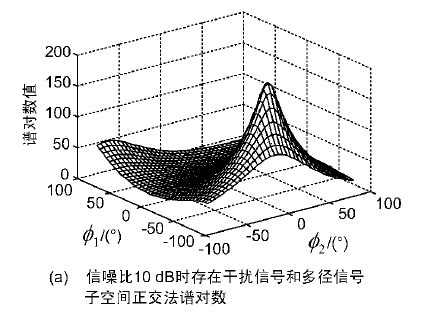
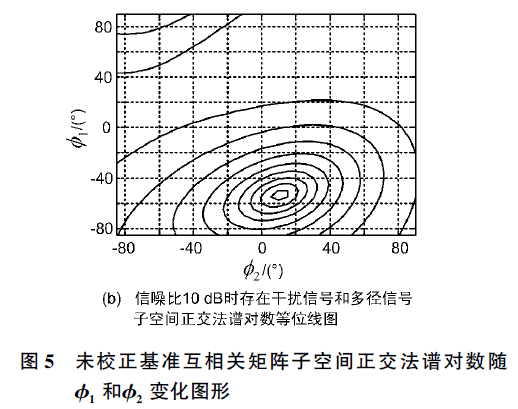
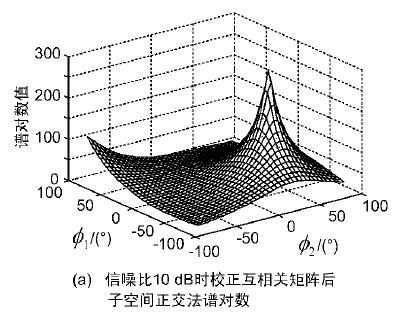
5.仿真实验
6.结束语
测控技术利用电磁波时域信息测距,频域信息测速,空域信息测方位,极化域信息却没有得到深入研究和利用,本文正是在这一领域展开探索,只需运动平台上有单一接收点,就可实现姿态/ 航向感知,系统可微型化,信号不受多径效应困扰,既可以利用主动发射电磁波信号,也可以被动接收空间分布的广播电磁波信号测量姿态,提高了系统的隐蔽性。适用于空或天飞行器
|  |联系我们|法律声明|用户协议|AMT咨询|商务合作|会员入驻|积分充值|积分商城|积分奖励规则|TradEx全球购|加入QQ技术群|添加企业微信|加入微信技术群|文章投稿|
世界先进制造技术论坛™(简称AMT™, 制造知网™)
( 沪ICP备12020441号-3 )
|联系我们|法律声明|用户协议|AMT咨询|商务合作|会员入驻|积分充值|积分商城|积分奖励规则|TradEx全球购|加入QQ技术群|添加企业微信|加入微信技术群|文章投稿|
世界先进制造技术论坛™(简称AMT™, 制造知网™)
( 沪ICP备12020441号-3 )







 发表于 2017-11-30 14:32:00
发表于 2017-11-30 14:32:00


{kind=link}