|
来源:河北科技大学电气工程学院 作者:吴 鸿 冯登超
摘 要:传统四旋翼控制系统采用人工遥控控制,在搜救过程中牵扯人员精力太大并且实施飞行条件较高。现旨在缩短救援时间、提高操作便捷性,对四旋翼飞行器的各项性能做出了改进。整个系统采用人工控制模式与自动搜救模式相结合的方式对飞行器进行控制,同时也扩大了四旋翼飞行器在搜救过程中的使用范围。人工控制部分基于STC12C5A60S2 单片机进行设计,结合指纹识别传感器、角度传感器、nRF24L01 无线传输模块、QQ 飞控、摄像头、12864 液晶屏等元器件可完成身份认证、手势采集、无线传输、飞行姿态调整、高度调整及回传地理位置检测、环境视频监控信息等功能。自动控制部分基于STC12C5A60S2 单片机,结合GPS 模块、指纹识别传感器、nRF24L01 模块、超声波模块、红外感应模块、QQ 飞控、摄像头等。系统最终实现了低空空域自动避障,自动搜人等功能。
关键词:四旋翼飞行器;智能搜救;人工控制;低空空域
1.引 言
四旋翼飞行器具有独立起飞和降落能力,可以轻松完成各种飞行动作。在我国,四旋翼飞行器正逐步应用于低空空域的数字航拍、智能搜救等各个方面[1] 。传统四旋翼控制系统采用人工遥控控制,对控制人员的技术水平有较高要求[2] ,在复杂地形飞行时更需要操控人员实时跟随。由此可见,传统四旋翼飞行器在作业过程中牵扯人员精力太大并且实施飞行条件较高,不利于救援工作的进行[3] ,与此同时救灾过程中的时间极其宝贵,所以传统四旋翼飞行器的诸多特点给救灾带来了许多不便之处[4] 。本文设计便针对救灾,特别是搜救方面,对传统四旋翼飞行器做出了一系列的改进,使四旋翼飞行器在搜救方面的性能大幅度提高。通过改进四旋翼飞行器可实现自动搜索人员,检测到人员信息后将其地理坐标和视频图像回传至搜救工作处[5] 。其中,整个系统的自动避障功能提高了其在危险地域作业的可实施性[6] 。四旋翼飞行系统的自动控制功能使得一名操作人员可同时控制多架四旋翼飞行器。改进后的四旋翼飞行器对操作人员的技术水平要求较低,可以大量减少搜救过程中人员的投入,更利于搜救工作的顺利进行。
2.智能搜救系统的模式设计
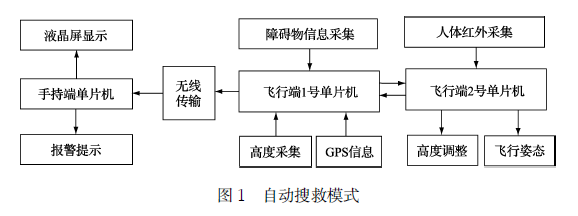
操作员通过指纹识别模块验证身份后方可进入系统。系统分为自动搜救模式和人工控制模式两种控制模式,且此两种模式通过手持端系统进行切换。模式一自动搜救模式包含手持端和飞行端两部分,无需人为控制。在自动搜救模式下,路径规划是实现飞行器高度自主导航的重要环节之一[7] ,飞行器可通过多个传感器相互配合实现自动定高、避障、寻找人员的功能,并能实现图像实时传输,定位人员地理位置及回传信息至手持端,方便救援工作的进行。自动搜救模式如图1 所示。
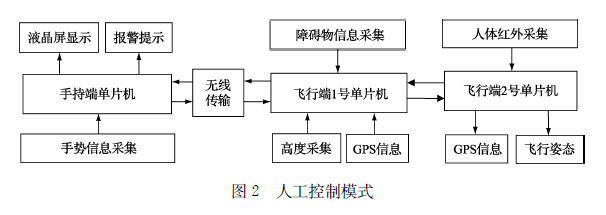
模式二为人工控制模式。在该模式下,手持端可以根据人的手势对飞行端发出控制指令,进而调整四旋翼飞行器的飞行姿态,该设计使工作人员可以通过简单的手势远程控制飞行器的姿态。人工控制模式大大提高了系统操作的便捷性、可控性和安全性。模式二人工控制模式如图2 所示。
3.控制系统整体设计
选用3 片STC12C5A60S2 单片机为主控芯片搭建整个系统的控制框架,用以完成两种工作模式的相互切换和各项功能。3 片单片机分别以手持端系统,飞行端1 号系统和飞行端2 号系统命名。
3 .1 手持端系统设计
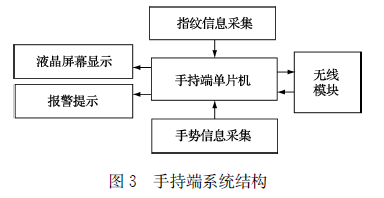
手持端系统为地面控制部分,使用nRF24L01 无线模块、GY‐61 角度传感器模块、LCD12864 液晶模块、FM‐180指纹识别模块分别实现无线传输、手势采集、屏幕显示、指纹识别功能[8] 。
系统主要作用为:
1)对操作人员进行指纹的采集和判定,依据判定结果决定是否允许操作人员进入系统操作界面。
2)通过按键操作来设定工作模式。
3)在人工控制模式下,对操作人员的手势进行判定并向飞行端1 号系统发出控制指令。
4)对飞行器坐标、搜索到的人员信息进行显示。
5)系统具有报警功能,当指纹录入错误或飞行端搜索到人员信息后,手持端系统将进行报警提示。手持端的系统结构如图3 所示。
3 .2 飞行端1 号系统设计
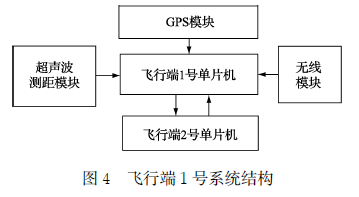
飞行端1 号系统为环境信息采集部分,位于四旋翼飞行器上,使用nRF24L01 无线模块、GPS 模块、超声波模块分别实现无线传输、GPS 定位、障碍物识别功能[9] 。系统该系统主要作用为:
1)采集GPS 信息并进行分析。
2)通过8 路超声波模块采集周边障碍物情况。
3)分析周边环境状态并向飞行端2 号系统发出指令,控制四旋翼飞行器调整飞行姿态。
4)提取3 号机传输的人员搜索信息并回传给手持端系统。飞行端1 号系统结构如图4 所示。
3 .3 飞行端2 号系统设计
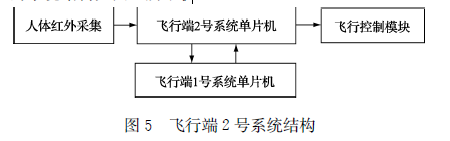
飞行端2 号系统为四旋翼飞行器的姿态控制部分,系统搭载人体红外检测和QQ super 多旋翼飞行控制器,用于检测人员和控制飞行器飞行姿态[10] 。主要作用为:1)输出四路可调PWM 波控制飞行控制器,进而通过飞行控制器调整飞行姿态。2)完成对人员的自动搜索并实现对人员的实时跟随。当人员确定存在后,向飞行端1 号系统发送人员存在指令。3)人工控制模式下,提取2 号机发过来的控制指令,通过飞行控制器调整四旋翼飞行器的姿态。飞行端2 号的系统结构如图5 所示。
4.硬件设计与调试
4 .1 指纹识别部分的设计
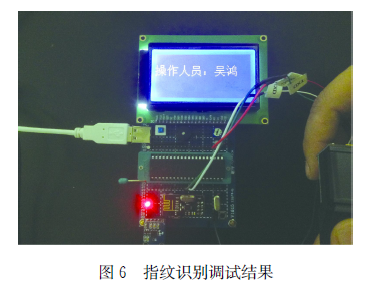
手持端系统开机后,进入指纹认证环节。系统会自行判别指纹模块是否可以正确工作,如果可以正常工作则亮起指纹模块正常工作指示灯。指纹采集过程中,通过比对每次采集到的指纹信息与指纹库中的指纹相匹配,若正确匹配则显示工作人员姓名,否则启动报警。调试结果如图6所示。
4 .2 手势采集部分的设计
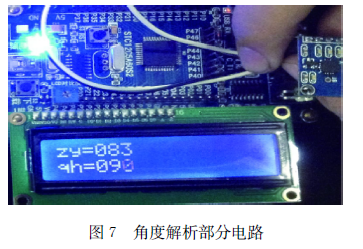
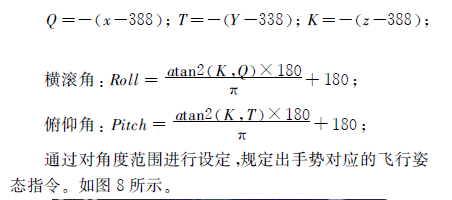
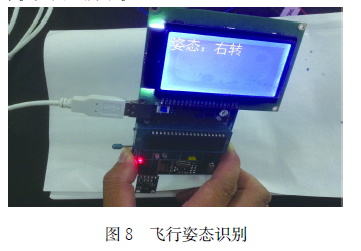
手势采集设计使用GY‐61 模块,输出的3 路电压信号经过A/D 转换得到的数值为x 、y 、z ,其中338 为0 g 对应电压值。通过计算可得出GY‐61 角度传感器模块倾斜角度,如图7 所示。
4 .3 GPS 定位设计
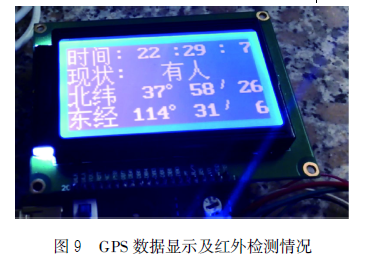
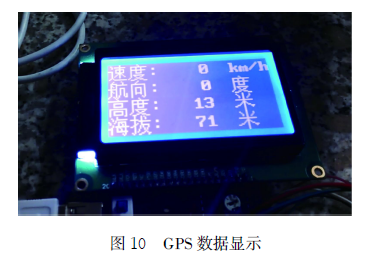
飞行端1 号系统所使用的GPS 模块所采用的输出协议采用NMEA‐0183 协议[11] 。此次设计需要解析的字段有两条,分别是:GPGGA 、GPRMC 。飞行端1 号系统对GPS 模块输出数据进行解析,将该数据通过nRF24L01 无线模块传给手持端系统并进行显示。显示如图9 和10 所示。
4 .4 避障和人员检测部分设计
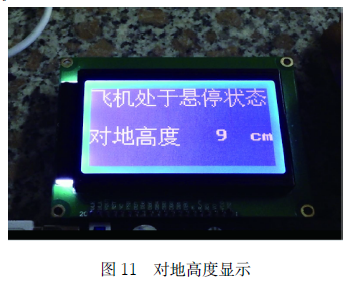
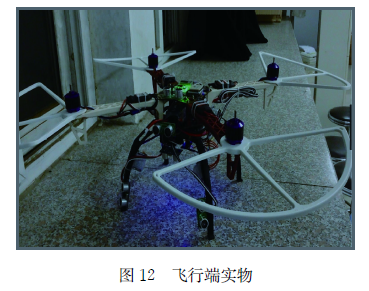
飞行端使用8 路超声波传感器和5 路红外传感器,实时监测周围障碍物以及人员信息,其中对地超声波传感器用于高度调整,飞行器预设对地高度为2 m ,自动搜救模式下可进行避障飞行。当红外传感器检测到人员信息后回传信号至手持端。手持端对红外检测及对地高度测量分别在图9 和11 显示出来。当前飞行端实物如图12所示。
4 .5 飞行姿态控制的设计
飞行姿态采用QQ super 多旋翼飞行控制器进行控制,此控制器使用了精密的数字陀螺仪。QQ‐S 带有加速度传感器,能够给多旋翼飞行器提供卓越的姿态稳定功能。系统采用单片机输出占空比控制飞行控制器,控制流程如图13 所示。
图13 飞行控制器控制流程
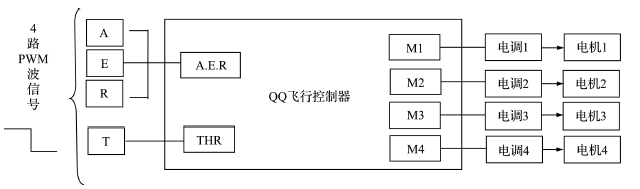
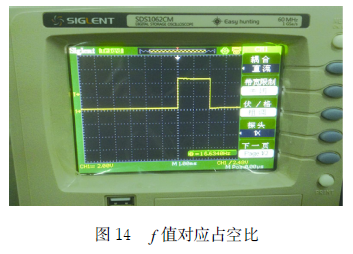
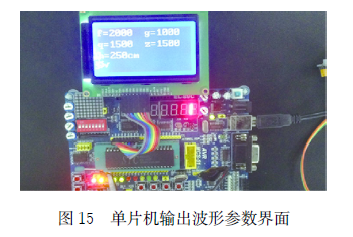
QQ 飞行控制器的工作模式选择X 四轴。向QQ 四旋翼输出4 路PWM 波,通过调节每路波形的占空比大小可以控制四旋翼飞行器的飞行状态,T HR 信号对应四旋翼飞行器油门大小,A 信号控制四旋翼飞行器沿副翼方向的运动,E 信号控制四旋翼飞行器沿前后方向的运动,R信号控制四旋翼飞行器的转向运动。图14 为单片机P1 .1 口输出PWM 波形,即液晶屏(如图15 所示)中f 所对应的PWM 波形参数。f 、g 、q 、z分别表示4 路PWM 波在一个周期中高电平所占时间,量级为μs 级别。飞行器控制器在4 路PWM 波控之下控制飞行器飞行,如图16 所示.
5.整体调试
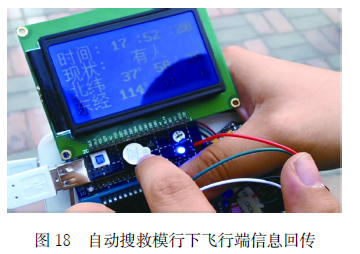
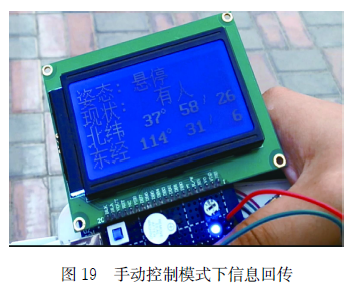
系统各部分调整完毕,进行整体验证,飞行端自动搜救模式下进行避障飞行并向手持端实时回传数据(如图17所示) ,当检测到人员信息时,手持端现状提示为有人,同时显示回传的时间以及经纬度坐标等信息,现象如图18 所示。在手动控制模式下,显示信息为飞行姿态、经纬度等信息(如图19 所示) 。手持端左倾时飞行端飞行状态如图20 所示,实现左倾飞行。经验证系统可以完成预期目标,实现自动搜救模式与手动控制模式相结合,完成了受困人员定位等工作。
6.结 论
传统四旋翼飞行系统采用人工遥控控制,对操作人员的技术水平有较高要求,在复杂地形需要操作人员实时跟随,作业过程中牵扯人员精力太大并且实施飞行条件较高,本文设计将遥控控制转变为单手手势控制,极大的提高了操作便捷性,整个系统的自动避障保护功能不仅提高了危险地域作业的可实施性,也使在复杂地域的远程控制成为可能。系统在单一视频回传的基础上,加入了GPS信息回传,为精准救援提供便利。系统的自动搜救模式可自动完成人员搜索,可支持一人同时控制多架四旋翼飞行器,一定程度上减少搜救过程中人员的投入。改进后,整个系统在操作便捷性,远程操作性,精准救援性和人力节省等方面都有很大提高,更利于搜救工作的顺利进行。
|  |联系我们|法律声明|用户协议|AMT咨询|商务合作|会员入驻|积分充值|积分商城|积分奖励规则|TradEx全球购|加入QQ技术群|添加企业微信|加入微信技术群|文章投稿|手机版|
世界先进制造技术论坛™(简称AMT™, 制造知网™)
( 沪ICP备12020441号-3 )
|联系我们|法律声明|用户协议|AMT咨询|商务合作|会员入驻|积分充值|积分商城|积分奖励规则|TradEx全球购|加入QQ技术群|添加企业微信|加入微信技术群|文章投稿|手机版|
世界先进制造技术论坛™(简称AMT™, 制造知网™)
( 沪ICP备12020441号-3 )







 发表于 2017-11-30 14:32:29
发表于 2017-11-30 14:32:29





{kind=link}