|
来源:海军航空工程学院飞行器工程系 作者:胡国才 吴靖 柳泉
摘要:建立了共轴式直升机旋翼/机体耦合的非线性动力学模型。在不考虑桨叶减摆器和起落架非线性因素的前提下,通过求解某模型直升机不同转速时桨叶摆振和机体运动的时域响应,确定了该直升机发生地面共振的转速范围,并与特征值分析确定的共振转速范围进行了对比验证。最后,分别采用非线性动力学模型和线性化模型对不同转速时的上、下旋翼桨叶摆振和机体运动响应进行了动态仿真计算,发现:在稳定区内,系统非线性因素的影响不大;在不稳定区,非线性系统与线性化系统的响应特性呈现显著差异,且非线性系统将出现极限环现象。
关键词:共轴式直升机;地面共振;非线性;仿真分析
共轴式双旋翼构型以其特有的优势被认为是发展高速直升机的一个主要方向‘¨,但近年来出现了多次共轴式直升机舰面共振事故,使共轴式直升机动不稳定问题成为迫切需要解决的问题。对于直升机旋翼/机体耦合动不稳定现象的研究,最经典的是采用旋翼多桨叶坐标变换和系统特征值分析直升机的自激振动心1。该方法将直升机动力学系统简化成线性系统,但桨叶减摆器和起落架的刚度和阻尼的非线性特性决定了直升机动力学系统事实上是一个旋翼/机体耦合的非线性系统。对直升机这类较复杂的非线性动力学系统现多采用数值仿真和时域参数识别,不仅能够模拟缩比模型的试验[3],更可以用于分析减摆器非线性[4]、动态失速‘51和减摆器故障‘63等因素对直升机非线性动力学行为和动稳定性的影响。但是,现有大部分研究不管是地面共振机理分析[71还是设计参数影响分析口。叼都是针对单旋翼带尾桨直升机,而对共轴式直升机旋翼/机体耦合动稳定性的研究比较少,关于共轴式直升机旋翼/机体耦合非线性动稳定性的研究则更少。文献[11]对共轴式直升机地面共振进行了理论和试验研究,地面共振的数学模型考虑上/下旋翼桨叶的摆振运动、上旋翼轴的弹性弯曲和机体6自由度运动,起落架用线性弹簧一线性阻尼器代替,桨叶摆振阻尼也等效成线性阻尼。文献[12]对两片桨叶的单轴或共轴双旋翼系统在各向异性柔性支座上振动的稳定性问题,提出了一种数值仿真的分析方法。文献[13]提出了一种共轴式直升机地面共振的时一频分析方法,通过各模态的特征值和时域响应分析,对上、下旋翼与机体之间的相互作用进行了解释。
本文建立了共轴式直升机旋翼/机体耦合的非线性动力学模型。在不考虑桨叶减摆器和起落架非线性因素的情况下,对某模型直升机进行了动态仿真,并通过对比线性化模型计算结果分析了非线性因素的影响。该非线性动力学模型也可进一步用于分析减摆器和起落架非线性因素对共轴式直升机地面共振的影响。
1.非线性动力学模型
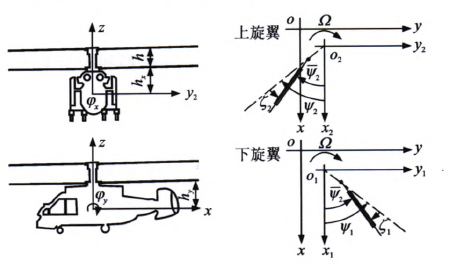
共轴式直升机有上、下两副旋翼,各N片桨叶,以转速n反向旋转,如图1所示。
图l 共轴式直升机坐标系简图
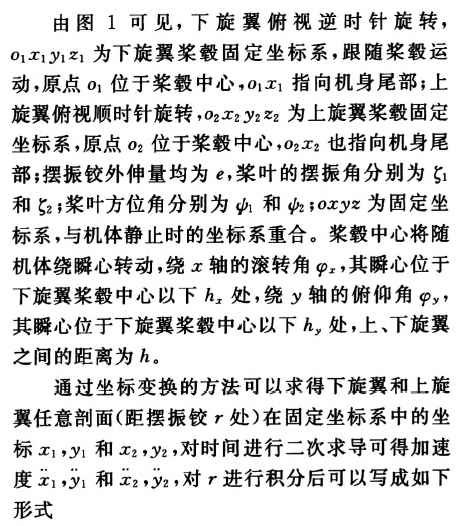

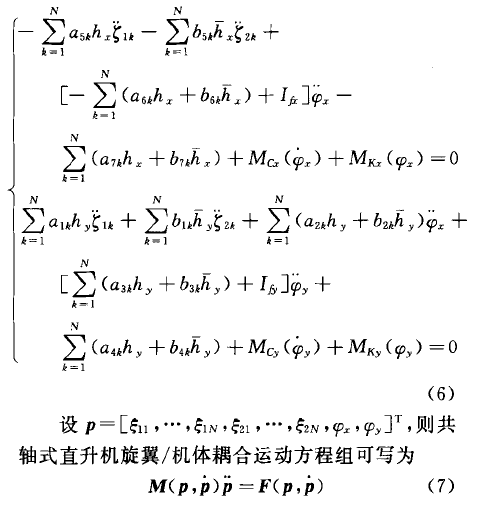
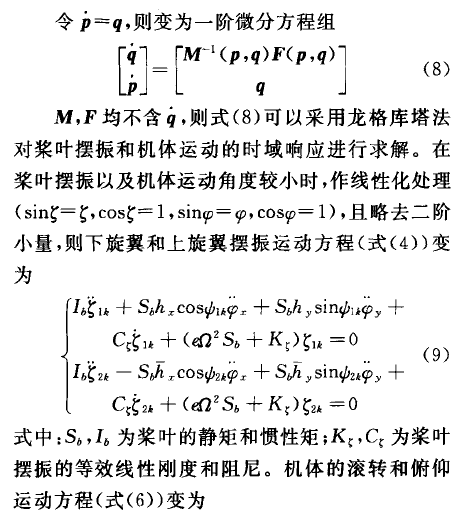
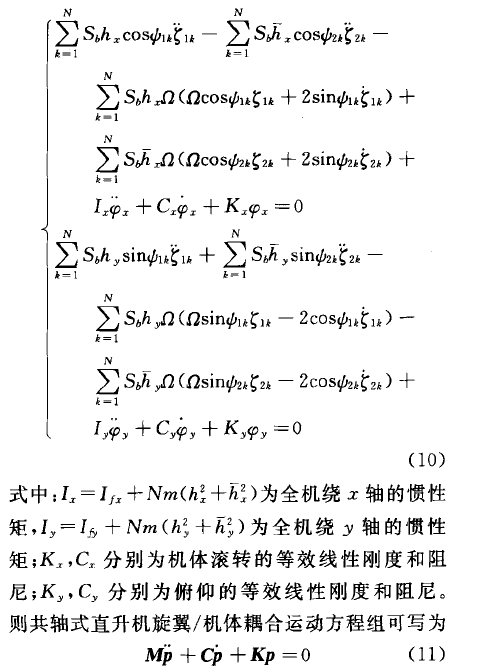
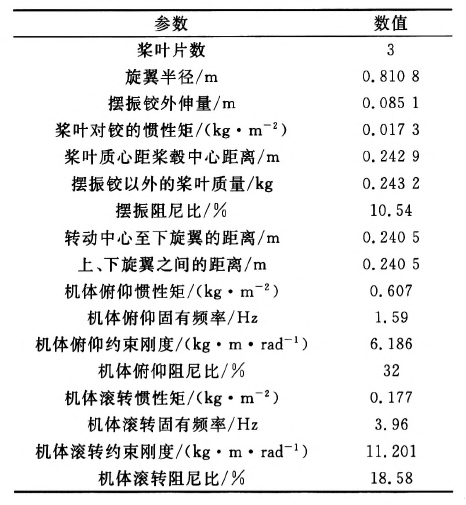
表1 旋翼及机体数
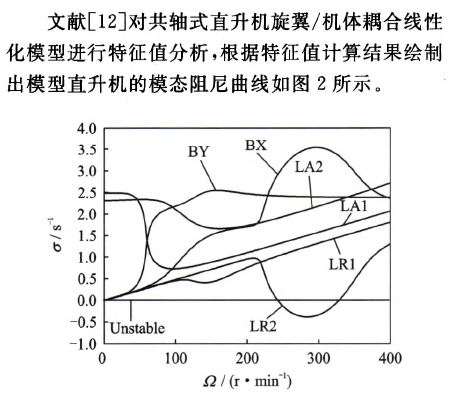
图2 模态阻尼随旋翼转速的变化曲线
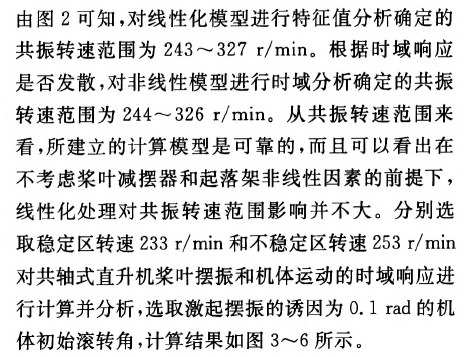
图3 转速233r/min时非线性模型计算结果
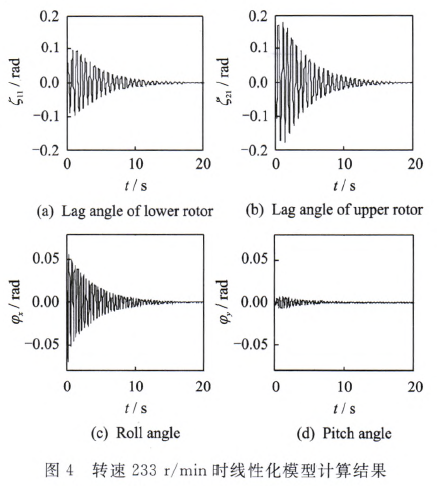
由图3,4可见,在稳定区内,桨叶摆振和机体运动呈衰减趋势。由于桨叶摆振和机体运动是以小角度开始衰减,运动一直处于小角度范围内,且未考虑桨叶减摆器和起落架的非线性因素,此时线性化处理对桨叶摆振和机体滚转的时域响应影响并不大。
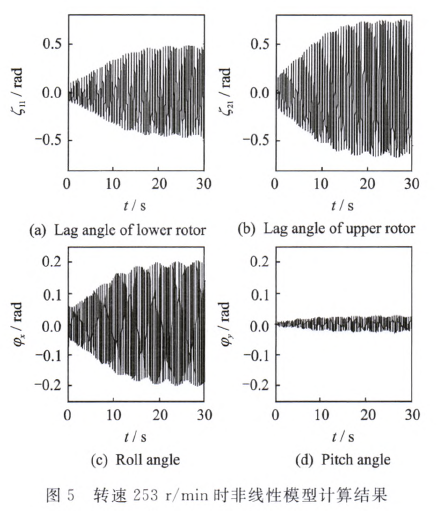
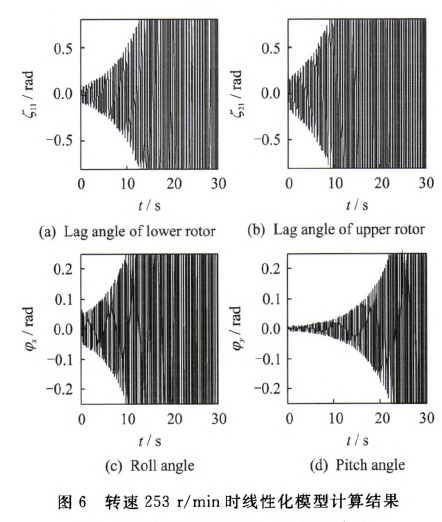
由图5,6可见,在不稳定区内,非线性系统和线性化系统的响应特性呈现显著差异,非线性系统的桨叶摆振和机体运动发散到一定程度后会出现极限环现象。
3.结论
本文建立了共轴式直升机旋翼/机体耦合的非线性动力学模型。在不考虑桨叶减摆器和起落架非线性因素的前提下,通过求解某模型直升机不同转速时桨叶摆振和机体运动的时域响应,确定了该直升机发生“地面共振”的转速范围,并与特征值分析确定的共振转速范围进行了对比验证,证实了该动力学模型的可靠性。最后,分别选取稳定区转速233 r/rain和不稳定区转速253 r/min对共轴式直升机桨叶摆振和机体运动的时域响应进行计算,从结果可知:(1)在稳定区内,未考虑桨叶减摆器和起落架非线性因素时,系统非线性因素的影响不大;(2)在不稳定区,非线性系统与线性化系统的响应特性呈现显著差异,且非线性系统将出现极限环现象。
本文所建立的共轴式直升机旋翼/机体耦合非线性动力学模型,也可用于分析减摆器和起落架非线性因素对共轴式直升机地面共振的影响。
|  |联系我们|法律声明|用户协议|AMT咨询|商务合作|会员入驻|积分充值|积分商城|积分奖励规则|TradEx全球购|加入QQ技术群|添加企业微信|加入微信技术群|文章投稿|
世界先进制造技术论坛™(简称AMT™, 制造知网™)
( 沪ICP备12020441号-3 )
|联系我们|法律声明|用户协议|AMT咨询|商务合作|会员入驻|积分充值|积分商城|积分奖励规则|TradEx全球购|加入QQ技术群|添加企业微信|加入微信技术群|文章投稿|
世界先进制造技术论坛™(简称AMT™, 制造知网™)
( 沪ICP备12020441号-3 )







 发表于 2017-12-1 16:58:27
发表于 2017-12-1 16:58:27


{kind=link}