查看: 6428 | 回复: 1
| ||
相关帖子 |
||
 |联系我们|法律声明|用户协议|AMT咨询|商务合作|会员入驻|积分充值|积分商城|积分奖励规则|TradEx全球购|加入QQ技术群|添加企业微信|加入微信技术群|智造号|手机版|
世界先进制造技术论坛™(简称AMT™, 智造云™)
( 沪ICP备12020441号-3 )
|联系我们|法律声明|用户协议|AMT咨询|商务合作|会员入驻|积分充值|积分商城|积分奖励规则|TradEx全球购|加入QQ技术群|添加企业微信|加入微信技术群|智造号|手机版|
世界先进制造技术论坛™(简称AMT™, 智造云™)
( 沪ICP备12020441号-3 )
GMT+8, 2026-4-21 15:57 , Processed in 1.161520 second(s), 59 queries .
论坛声明:AMT-智造云(世界先进制造技术论坛) 属纯技术性论坛,我们严格遵守《中华人民共和国网络安全法》、《个人信息保护法》等国家相关法律法规,请勿发布非法言论、非法广告等信息,多谢合作。
本论坛言论纯属发表者个人意见且会员单独承担发表内容的法律责任,与本论坛立场无关;会员参与本论坛讨论必须遵守中华人民共和国法律法规,凡涉及政治言论、色情、毒品、违法枪支销售等信息一律删除,并将积极配合和协助有关执法机关的调查,请所有会员注意!
本论坛资源由会员在本论坛发布,版权属于原作者;论坛所有资源为会员个人学习使用,请勿涉及商业用途并请在下载后24小时删除;如有侵犯原作者的版权和知识产权,请来信告知,我们将立即做出处理和回复,谢谢合作!
合作联系: 双日QQ客服:3419347041 单日QQ客服:3500763653 电话021-37709287 合作问题投诉:QQ:2969954637 邮箱:info@amtbbs.org 微信公众号:AMTBBS








 发表于 2017-12-5 16:42:03
发表于 2017-12-5 16:42:03
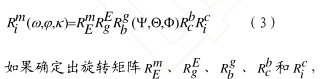 则联立式(2)和(3),可直接求解出外方位角元素ω、ψ、κ组成的旋转矩阵。
则联立式(2)和(3),可直接求解出外方位角元素ω、ψ、κ组成的旋转矩阵。

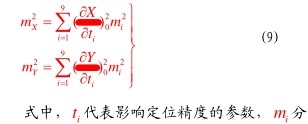 别代表它们的误差。各偏导数的表达式由以下(10)、(11)式给出。
别代表它们的误差。各偏导数的表达式由以下(10)、(11)式给出。

 网中的第i 行和第 j 列。最后,由于每一格网的4 个角点的坐标矢量已知,用它们作为控制,对格网内的点只要按一次多项式内插既可实现图像的几何纠正。 实验表明, 这一方案利用牺牲少量几何精度的代价换取了处理效率的大幅提高。
网中的第i 行和第 j 列。最后,由于每一格网的4 个角点的坐标矢量已知,用它们作为控制,对格网内的点只要按一次多项式内插既可实现图像的几何纠正。 实验表明, 这一方案利用牺牲少量几何精度的代价换取了处理效率的大幅提高。 




{kind=link}