很多接触机器人或单片机不久的朋友面对种类繁多的单片机常会困惑,到底它们之间有何不同?制作机器人到底用哪种单片机控制比较好?当我们选择了一种单片机后,有何捷径能迅速掌握并应用这种单片机?本文尝试用一种通俗易懂的方法解读上述问题,并设计了一种有深度的单片机控制机器人的实例,希望能起到抛砖引玉的作用。我与大家分享我使用单片机的一些经验,希望能让初学者少些迷茫,让已经入门的朋友思维开阔。
在前文中我们已经讲到:
一 单片机和CPU、个人电脑的区别和联系
二 在单片机诞生前人们用什么控制机器人
三 入门首选 AT89S51系列单片机
下面将就继续前文
四 爱好者制作机器人首选 AVR系列单片机
1 简介
AVR单片机是1997年由ATMEL公司研发出的增强型内置Flash的RISC(Reduced Instruction Set CPU) 精简指令集高速8位单片机。高可靠性、功能强、高速度、低功耗和低价位一直是衡量单片机性能的重要指标,而AVR单片机是典型高性能单片机。
早期单片机,比如51单片机为了提高可靠性(防止数据误读或跑飞)采用较高的分频系数对时钟分频,使得指令周期长,执行速度慢。例如51单片机需要12个晶振周期才能组成1个机器周期,而且很多指令需要2个机器周期才能执行。AVR单片机的推出,彻底打破这种旧设计格局,废除了机器周期,采用精简指令集,取指周期短,又可预取指令,实现流水作业,故可高速执行指令。AVR单片机在12个晶振周期中能执行12条指令,从这个角度看,如果晶振频率相同,AVR的速度是51的12倍到24倍。
AVR有32个通用寄存器,在进行大量复杂运算时,AVR的32个寄存器可相当于51的32个累加器,克服了51系列单片机只有单一累加器数据处理造成的瓶颈现象,在复杂运算时速度比51快5倍以上。由此可看出,51与AVR相比是多么慢,AVR是多么快。
AVR 系列单片机多内部集成了多路AD转换器、电压比较器、ISP、I2C、JTAG总线电路、UART串口、大功率IO口、看门狗等实用电路,并且很多AVR 单片机型号有EEPROM、FLASH、SRAM三种存储器,可以实现实时修改程序存储器中的内容,即AVR单片机可以自己修改自己的程序。同时AVR一般能工作在宽电压范围(2.7~6.0V),有的居然可以在1.8V电压下工作。以上这些性能只是AVR众多性能中的一部分,然而已经让51系列单片机望尘莫及了。
如此高性能的单片机价格居然和51单片机差不多,比如ATmega8价格为8元左右,ATmega16在13元左右,这是AVR有极高性价比的真实写照。

2 性能
AVR家族人丁兴旺,包括ATinyAVR(微小型)、低功耗类、ATmegaAVR高中低档5类单片机。它们都基于同一核心技术,但在内部集成的电路多少上有不同。不论你要做电子手表还是视频处理,都有一款合适的AVR单片机能满足你的需要。
本文只列出ATmega16中档单片机的性能:
16KB的FLASH程序存储器;512B的 EEPROM;1KB的SRAM;32个快速寄存器;32个大功率IO口;20个中断;2个外部中断口;有SPI、SUART、I2C总线接口;2个8位定时器;1个16位定时器;3个PWM通道;有实时时钟RTC;8个10位AD通道;电压比较器;看门狗;内置时钟振荡器;JTAG接口;ISP在线编程;电压范围为2.7V-5.5V;外部时钟晶振0-16MHz;有PID和多种贴片封装。
AVR的IO口能输出20mA和吸收40mA的电流,不仅可直接驱动LED,甚至可直接驱动微型直流减速电机。而且AVR的IO口可编程设置成输入、输出、高阻态状态,是真正的3态IO口。和51相比使用 AVR开发产品你会发现前所未有的方便和自由。
AVR单片机可上操作系统,比如UCOS2、Linux等,自主编程实现操作系统功能也很容易。
根据任务具体需要选择最合适的单片机,使单片机资源充分利用,使系统性价比达到最高,同时兼顾未来扩展需要,不要一味选用高性能单片机,这就是选单片机的原则。
用ARM+操作系统做超声波测距仪杀鸡用了牛刀。用AVR中档单片机做机器视觉有些吃不消。如果把它们调换一下,一切就恰到好处了。
3 使用方法
学AVR单片机的好书是AVR单片机嵌入式系统原理与应用实践,封面见下图。
AVR一般采用CVAVR 编程软件编程,也可用GUN GCC AVR、AVR Studio软件编程。可采用汇编或C语言编程。烧程序前先输出HEX文件,然后用SLISP(双龙ISP)软件加载,再通过ISP编程线或者25针并口连接线烧入AVR单片机,支持在线编程。
由于AVR单片机最小系统很简单,就是电源+晶振(可不用)+LED+ISP接口(通电就运行,断电就停止,不用复位电路),因此任何初学者都可以用面包板搭出AVR最小系统,并且编程实践。
4 实践经验
使用AVR单片机时注意要正确设置熔丝位,SLISP软件就可设置,熔丝位可决定单片机是采用外部晶振还是采用内部时钟振荡器,如果熔丝位设置为采用外部晶振,而电路中没有接入晶振,则AVR程序不能运行。很多初学者忽视了这一点,他们的AVR系统不能运行却找不到原因。再有就是AVR的IO口在使用前需先编程设置其状态,否则你将发现程序在运行,但IO口没信号。

4 应用举例


五 高级机器人控制器 ARM
1 简介
ARM是一个公司名,他们基于同一内核设计了很多高性能处理器,这些处理器都叫ARM。该技术被很多公司购买后生产出了集成很多功能电路的ARM芯片,使得ARM成为高性能单片机。ARM一般为32位单片机,适于处理大量复杂数据,很多ARM装上了UCOS2、Windows CE、Linux操作系统,能够同时运行多个程序。ARM广泛应用于手机、MP3、GPS导航仪、吸尘机器人等产品上。

六 音频视频处理首选 DSP
1 简介
DSP数字信号处理(Digital Signal Processing,简称DSP),它是一种独特的微处理器,是以数字信号来处理大量信息的器件。其工作原理是接收模拟信号,转换为0或1的数字信号,再对数字信号进行修改、删除、强化,并在其他系统芯片中把数字数据解译回模拟数据或实际环境格式。它不仅具有可编程性,而且其实时运行速度可达每秒数以千万条复杂指令程序,远远超过通用微处理器,是数字化电子世界中日益重要的电脑芯片。它的强大数据处理能力和高运行速度,是最值得称道的两大特色。
在高速小车巡线、语音识别等领域DSP被广泛应用。但如果仅用DSP检测几个碰撞开关、控制几个电机显得大材小用。
七 新兴控制器 FPGA
1简介
FPGA(Field-Programmable Gate Array),即现场可编程门阵列,它是在PAL、GAL、CPLD等可编程器件的基础上进一步发展的产物。它是作为专用集成电路(ASIC)领域中的一种半定制电路而出现的,系统设计师可以根据需要通过可编辑的连接把FPGA内部的逻辑块连接起来,就好像一个电路试验板被放在了一个芯片里。简单说,如果使用者想开发一个用简单数字逻辑电路就能控制的小车,又嫌搭电路麻烦,他就可用软件给一个FPGA编程让它实现数字电路功能去控制小车。即FPGA可被用来模拟各种电路。有的FPGA甚至能模拟51单片机的运行。因FPGA通过编程即可修改它模拟的电路结构,因此在系统实验、调试中很方便,很多爱好者尝试用FPGA做机器人控制器。
八 更多可供选择的单片机
我们选择学一款单片机前首先要考虑自己面对的实际任务需要什么性能的单片机,然后在众多性能满足要求的单片机中作出选择。此时我们还要考虑不同单片机的 "应用广泛程度",比方说:当我们要做一个电子大赛智能小车,有AVR单片机和PIC单片机可满足任务需要,如何在两者中作出选择需要考虑哪种单片机学起来比较容易、学习资料容易获取、可供参考的程序和案例更加丰富、哪种单片机更容易获得编程软件和下载器等。笔者感觉要想做智能小车,AVR单片机的资料比较丰富。世界上有种类繁多的单片机,它们当中绝大多数都可用来控制机器人,但存在一个是否合适的问题。比如PLC是可编程控制器,当然可以用来控制爱好者手中的机器人,但PLC多用于工业控制领域,设备庞大价格昂贵,同时不易获得用PLC控制小型机器人的资料。爱好者选择学一种单片机前,首先得明确自己要用单片机干什么,然后再选最合适的单片机学习。学单片机重在学精一两种单片机,如果有人泛泛地学ARM、PLC、PIC、凌阳、DSP、FPGA等所有有名的单片机,那么他将无法拥有真正的深度开发能力。所谓深度开发,以AVR单片机为例,初学者可以用它实现小灯交替闪烁,中级技术人员可以用它控制参加比赛的机器人,而真正的高级开发人员可以用AVR实现机器视觉、无人机自动驾驶、坦克火控系统…… AVR单片机过时了吗? 有初学者甚至中级开发人员认为因ARM性能一般比AVR性能高,因此ARM将代替AVR,AVR将退出历史舞台,或者MSP430将代替51系列单片机,或者FPGA将取代所有单片机等。这种看法不对,因为不同单片机都有各自的特点和优点,没有哪种单片机是完美的,在不同场合用最合适的单片机,发挥它们各自的特长,而不存在ARM一统天下,取代所有其他型号单片机的可能性。试想,原本十几元的电子表因为采用ARM控制买到几百元,谁能受得了?因此不要觉得 AVR已经过时,学完51就直接学ARM,或者觉得学51没用,直接学ARM,否则你将碰壁。 MSP430系列单片机:比较适于机器人开发,是美国德州仪器推向市场的一种16位、具有精简指令集的、超低功耗的混合信号处理器。具有Flash存储器,中断源较多,并且可以任意嵌套,使用时灵活方便。MSP430系列单片机的电源电压采用的是 1.8~3.6V 电压。因而可使其在1MHz的时钟条件下运行时,芯片的电流会在200~400uA左右,时钟关断模式的最低功耗只有0.1uA。MSP430系列单片机的各成员都集成了较丰富的片内外设。它们分别是看门狗、模拟比较器、定时器、串口0、1、硬件乘法器、液晶驱动器、10位/12位ADC、16位 Sigma-Delta AD、直接寻址模块(DMA)、IO端口、基本定时器(Basic Timer)等的一些外围模块的不同组合。MSP430 系列单片机引进了JTAG技术,不仅使开发工具变得简便,而且价格也相对低廉,并且还可以实现在线编程。 PIC单片机:可用于机器人开发,是8位单片机,产品种类丰富,采用精简指令集,有不错的开发环境,引脚驱动能力强,可直接连接继电器控制强电。自带看门狗,有睡眠和低功耗模式。很多性能不如AVR和MSP430系列单片机,但因其有特殊优点,也被广泛应用。 凌阳单片机:比较适于机器人开发,以16位计算机为核心,集成不同规模的RAM、ROM和其他丰富的功能电路,使用者可以根据自己需要选择集成了特定功能电路的凌阳单片机。凌阳单片机指令系统提供出具有较高运算速度的16位,16位的乘法运算指令和内积运算指令,为其应用添加了DSP功能,因此凌阳适合进行语音识别。在我国凌阳单片机在学校比较常见,应用实例较多,可作为机器人爱好者选用的单片机。 九 实例:用AVR单片机创造机器生命 1 什么是机器生命 机器生命就是一个能自主生存的机器,一个自动为生存下去而奋斗的机器。对于机器生命来说,生存的含义就是不断电,继续运行。机器生命具有完全自主决策、自主行动、活动于未知世界、不需人类参与就能持续运行并且自我维护等特征。影片《终结者》中的天网就是超级机器生命。《霹雳5号》描述了一个机器人从无生命到有生命的过程。
N.维纳(Norbert Wiener,1894~1964)写控制论时创造出第一个机器生命Wiener龟,这个机器龟仅有2个电子管组成的模拟计算机,但它却能实现真正的乌龟觅食、睡觉、探索、逃避等行为,其表现如同一个有生命的生物一样。机器龟上面有太阳能电池,当自身电池快用完前,机器龟乐于寻找一个光线充足的地方充电,充满电后可能找个地方睡懒觉,或者探索未知世界,它有避免碰撞和避免到倾斜地方的趋向,我们无法预知它的行踪,因为它不是按照程序运行的,就如同我们自己一样。后来维纳在他的机器龟上又加了一个电子管,三个电子管连接成简单的神经网络,通过对机器龟训练,维纳通过摇铃可控制机器龟的行为。正如有生物学家训练狗使得狗听到摇铃声后就流口水。

2 我们可以自己动手做一个机器宠物
我们今天有先进的单片机,制作一个更好的机器生命其实不难。机器生命远比按固定程序运行的机器人好玩,就如同宠物狗比玩具狗好玩一样。我们设想的机器生命可以是一个小型履带式机器人,带有太阳能板,能感受光线强弱,障碍物距离和碰撞,为了实现人机互动,该机器生命具有语音识别功能。试想你学习一天,回到寝室,叫一声TONY,你的机器宠物转身飞快跑向你,那种感觉只有宠物的创造者才能体会
3 如何实现?如何设计电路?如何设计结构?
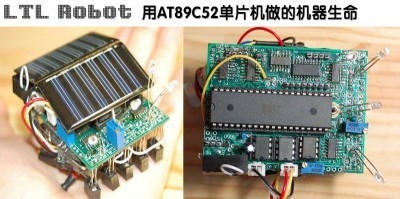
这个机器生命方案采用ATmega16单片机做控制器,单片机的8路AD通道和其余24个IO接口都被使用。AVR单片机AD转换频率高于音频,可以用来进行简单的语音采集。机器生命的程序较复杂,而AVR单片机适合进行快速复杂运算。本设计的电路板上除了ATmega16单片机外,还有2个LG9110 电机驱动芯片、2个LM386音频功放芯片,和LM393电压比较器芯片,再加上少量电阻电容和三极管,电路简洁,适合初学者和中级爱好者动手制作。
LCD采用通用1602模块,支持3位控制线4位数据线,如果你采用IO口复用技术,可用6条线控制LCD模块。
此方案涉及光电检测、自动充电、语音识别、超声波测距、键盘(4个碰撞开关)、LCD液晶显示、电机驱动等技术,这些都是动手做简单机器人的基本技术,如果爱好者能把这个机器生命做好,那么你的电路设计、调试经验和编程能力都会有很大的提高。
这个机器生命的技术含量相当于20世纪70年代国际机器人领域的先进水平。当时已经有很多非常精密和复杂的工业机器人被应用,但这种简单的机器人怎么能称作先进呢?因为技术的复杂和技术的先进不是一个概念,复杂+精密不一定等于先进。先进的东西不一定复杂和精密。

A 寻光
我们可以用光电二极管来检测光线强弱。当然也可以用光敏电阻。将光敏电阻和一个固定电阻串联接在电源正负极之间,光敏电阻靠近正极一侧。从光敏电阻和固定电阻连接点引出导线接到ATmega16的AD转换输入口。当强光照在光敏电阻时,光敏电阻阻值变小,因此其压降变小,而固定电阻分压增多,引出的AD检测电位升高,被单片机转化为数字量后判断光线增强。机器生命有5个光电传感器,其中4个面向机器人前后左右四个方向,另一个指向太阳能板所面对的方向。通过编程可以让机器人自主移动到光线最强的地方。
B 充电
本设计采用4.8V镍氢充电电池为系统供电。太阳能电池板正负极通过一个三极管与电池正负极相连。有一个电压比较器比较电池电压与太阳能板的压差,如果压差高于某值,比较器控制三极管导通,太阳能电池板对充电电池充电。充电电池电压上升,当高于某值时控制三极管关断,结束充电。为使太阳能板能对电池组充电,要求太阳能板在阳光直射下输出电压高于8V。

C 语音识别
用AVR单片机的高速AD检测功能能实现简单的语音识别。声音信号被驻极体电容话筒接收后送至LM386音频功放芯片放大和过滤后送至单片机AD转换口,单片机对音频信号幅值采样转化为一组数字,然后对这组进行取方差运算,得出一个特征值,该特征值可以用于简单的语音识别。比如你发一个"e",方差应该比较小,如果你发"p"爆破音,方差应该较大。当然,如果你用更复杂的数据处理,会得到更好的识别效果。本设计使用了2路声音信号,目的是让单片机判断出声源的大体方位。
D 超声波测距
用AVR的1个IO口输出40KHz信号送至超声波发射电路,当超声波遇到障碍物返回后,被超声波接收头接收,信号经CX20106A解码芯片处理,得到一个低电平脉冲,用该脉冲引发AVR单片机中断,AVR通过检查发波和收到回波之间的时间差即可算出障碍物距离。
E 电机驱动
本设计采用2片LG9110电机驱动芯片驱动两台直流减速电机。LG9110输出最大电流为800mA,仅需要2条控制线与单片机IO口直接相连即可控制一台电机正反转或者停止。LG9110仅有8个引脚,使用非常方便。
F 让机器生命更聪明
我的这个机器生命设计方案能实现最酷的效果是:白天,阳光明媚,机器生命跑到阳光底下晒太阳,太阳光会随着时间变化,机器生命能自动跑到最合适的位置享受日光浴。到了晚上,机器生命会找个安静的地方闭目养神,等待明天太阳升起。你可以训练机器生命,让它知道自己的名字叫什么。比如你叫着它的名字,同时站在它面前用强光照射它的太阳能电池板,如此反复训练,会使机器生命听到自己名字后向声源方向跑去,在距离声源一定远处停止,因为以往这样做它都能享受强光照射并充电。这就如同真正的宠物狗,你叫它名字它就跑到你跟前希望能获得食物。这一切都是完全能够实现的,关键就在于编程序实现它。
G 想象无极限,你的机器宠物将无所不能
以上方案中,ATmega16的功能被发挥到极致,以至于没有空闲的IO口,系统不能再扩展了。如果你用ATmega128单片机做,那么它拥有53个 IO口,30多个中断,128Kb的程序存储器,4Kb的RAM,使得你能编写更复杂的程序、储存更多的动态数据、连接更多的外设,你的机器生命将变得非常有生命力。比如加入三轴加速度传感器、地磁传感器、GPS定位、雨水传感器甚至摄像头、无线通信模块等,重新设计一个坚固和强劲的底盘,你的机器生命就可以在室外自由探索了。
以上芯片外设来源说明:在淘宝上购买很容易
底盘:340元的高级履带式1:16电动坦克模型
加速度传感器、地磁传感器:美国AD公司的40元ADXL330加速度传感器
GPS定位:几十元的车载外置GPS天线
最后,我想说,机器人是非常好玩的,只要你有想象力,有毅力,努力研究实践就能创造奇迹。
|  |联系我们|法律声明|用户协议|AMT咨询|商务合作|会员入驻|积分充值|积分商城|积分奖励规则|TradEx全球购|加入QQ技术群|添加企业微信|加入微信技术群|文章投稿|
世界先进制造技术论坛™(简称AMT™, 制造知网™)
( 沪ICP备12020441号-3 )
|联系我们|法律声明|用户协议|AMT咨询|商务合作|会员入驻|积分充值|积分商城|积分奖励规则|TradEx全球购|加入QQ技术群|添加企业微信|加入微信技术群|文章投稿|
世界先进制造技术论坛™(简称AMT™, 制造知网™)
( 沪ICP备12020441号-3 )





 发表于 2015-3-23 14:10:36
发表于 2015-3-23 14:10:36


{kind=link}