|
一、技术介绍
离线编程将工业加工过程所需要的三维信息通过CAD模型、三维测量仪器输入到交互式机器人系统软件。根据输入信息该模块自动产生机器人运动轨迹和程序。并针对不同的加工过程设置相应的加工过程参数,对生产过程进行控制。与常用的手工在线逐点机器人编程法相比较,该模块的使用将大大缩短编程时间。采用离线编程避免了生产过程的中断,提高了设备使用率。以下ABB机器人为例,说明如下: 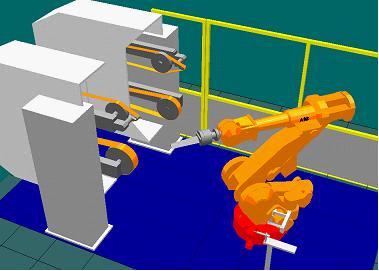
二、系统特点
1. 离线编程系统具有强大的兼容性,可输入多种不同类型的三维信息,包括CAD模型、三维扫描仪扫描数据、便携式CMM数据、以及CNC路径等。 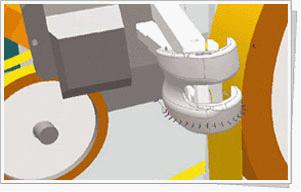
2. 多种机器人路径生成方式相结合:用鼠标在三维模型上选点;自动在曲面上产生UV曲线、边缘曲线、特征曲线等;曲面与曲面的相交线;曲线的分割、整合等;机器人路径的批量产生等。 3. 通过加工过程参数,在机器人加工路径的基础上,可自动生成完整的机器人加工程序。生成的程序可直接应用到实际机器人上,进行生产加工。 4.基于ABB虚拟控制器技术,您可以向离线编程系统中导入各种类型的机器人和外部轴设备,这些机器人具备和真实机器人同样的机械结构和控制软件,因此您可以在离线编程系统中模拟机器人的各种运动、控制过程,全程对生产过程时间及周期进行准确测算,还可以进行系统的布局设计、碰撞检测等。 三、系统效益
1.降低新系统应用的风险:在采用新的机器人系统前,可以通过离线编程平台进行新系统的测试,从而避免应用上的风险,同时降低新系统的测试成本。 2. 缩短机器人系统编程时间:尤其是对于复杂曲面形状的工件来说,采用离线编程软件可显著缩短产生机器人运动路径的时间。 3.无需手工编写机器人程序:通过各种控制模型,在离线编程软件中可以自动生成完整的可用于实际机器人上的机器人程序。 4.缩短新产品投产的时间。 5.通过离线编程,减少了占用实际生产系统的时间,增加生产效益。 6.虚拟仿真技术的应用提高了机器人系统的安全性。 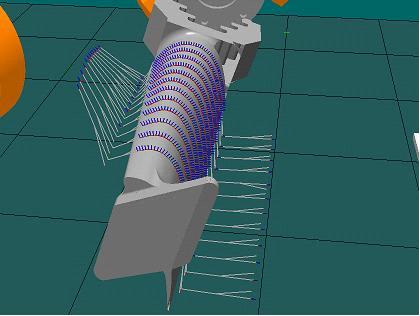
|  |联系我们|法律声明|用户协议|AMT咨询|商务合作|会员入驻|积分充值|积分商城|积分奖励规则|TradEx全球购|加入QQ技术群|添加企业微信|加入微信技术群|文章投稿|
世界先进制造技术论坛™(简称AMT™, 制造知网™)
( 沪ICP备12020441号-3 )
|联系我们|法律声明|用户协议|AMT咨询|商务合作|会员入驻|积分充值|积分商城|积分奖励规则|TradEx全球购|加入QQ技术群|添加企业微信|加入微信技术群|文章投稿|
世界先进制造技术论坛™(简称AMT™, 制造知网™)
( 沪ICP备12020441号-3 )





 发表于 2015-2-25 20:13:01
发表于 2015-2-25 20:13:01
 楼主
楼主 发表于 2015-3-16 21:23:07
发表于 2015-3-16 21:23:07
 发表于 2015-3-17 09:13:27
发表于 2015-3-17 09:13:27


{kind=link}