| 图1 Renscan5TM── 一种革命性的测量技术 |
REVOTM系统概述
REVOTM
是Renishaw公司推出的新一代动态量测扫描测头。这一革命性的新产品是为了让三次元量测仪在保持其系统高精度的同时,仍能发挥最高的量测效率而设计的。
REVOTM
量测头的特点是它的两轴都采用了球面空气轴承技术,由连接于高分辨率编码器之现代化的无刷电动机驱动来提供最快速且超精密的定位精度。
此系统包括以下组件:
REVOTM测头座
RSP2 2D端部感应测头
RSP3 3D测头
UCC2通用型三次元量测仪控制器
UCC2专用REVOTMPCI适配卡(接口插件)
SPA2伺服功率放大器
测头座技术
REVOTM测头座是使用先进的空气轴承专利技术所构建,用来提供超高刚性的量测平台。而低阻力和低摩擦力可提供其高加速性和转向性。轴承(每个轴中有一个)内装有连接着0.08弧秒编码器的高标准无刷电动机,这个编码器能够读出250毫米长测头的探针端部0.1μm以内的位置读数。

图2 |
通过各轴间坚硬的金制滑动环接触而作无限制旋转。这是设计中唯一表面有接触而运动的部分。我们对它们进行了5千万个周期的测试,并且在测试结束时仍未发觉到性能有所降低。这相当于按正常的工作周期运行5年以上的时间,还不需要维修。这些滑动环只是用来提供电力的;通过各轴间的电容链路来进行通信,所以不会使滑动环产生劣化。
空气轴承的轴向刚度达到了30牛顿/微米,这就会产生一个可以快速加速的稳定量测平台,其表面扫描速度可以高达500毫米/秒。这些技术条件与测头和伺服控制系统的特点相结合,可实现超高精度的量测,大大提高了量测效率。这就使得三次元量测仪的使用更加有效,并减少瓶颈限制。
除了可以进行高速量测之外,Renscan5TM五轴系统还可以实现快速定位,即能够随三次元量测仪同步移动的测头座进行快速重新定位。五轴运动也可以对一些特殊的形状进行检测,以前检测这些形状时会需要复杂的探针结构和更大的三次元量测仪工作区,这二者都不利于成本控制和量测运用。
测头技术
为将测头机构在高速运动状态下的动态效应降至最低,采用了新颖的测头设计,使用激光来精确检测测头探针端部的确切位置。一束激光从安装在REVOTM测头座上的测头体内光源处射出,向下穿过一个中空的探针,一直射到探针端部的反射镜上。
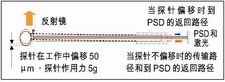
图3 |
不同于传统的探针,传统探针必须越不易弯曲越好,而REVOTM探针则为弯曲设计,通常是在离探针端部约50微米处。这可偏转激光束的返回路径,光束将由同样安装在测头体内部的PSD(位置传感器)接收。
射在PSD上的激光点移动将与测头座和测头几何运动变化以及三次元量测仪每轴光学尺的输出值结合在一起,并被转换成量测值输出。从而即可推算出探针端部在空间中的确切位置。这一切都是在测头座随三次元量测仪同步移动、探针端部对工件进行动态扫描的时候发生的。
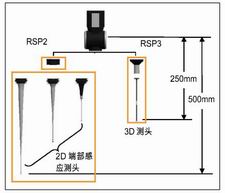
图4 |
测头范围的特点为两种传感器。如前介绍的一种是为了量测大多数形状而设计的,具有2D感测功能。另外,还有一种基于SP25M技术的3D扫描测头,即Renishaw的创新产品:PH10安装式扫描测头。这两种测头分别称为RSP2(REVOTM 2D扫描测头)和RSP3(REVOTM 3D扫描测头)。RSP2将进行大部分的动作,而RSP3则只是在出现曲柄式探针和盘式探针时才会被运用。RSP2只包含一个测头体,探针夹部分的长度自测头座下方轴线中心算起在250毫米至500毫米之间,而RSP3则使用标准的SP25M规格探针夹。
基于常用的MRS系统,测头和探针可透过交换架来重新配置,您可以使用带插槽的单独端口来定制一个系统,以满足量测应用的具体需要。
控制系统技术
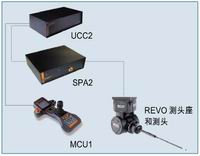
图5 |
Renscan5TM和REVOTM是基于UCC2/SPA2的系统。UCC2是Renishaw为了进行三轴和五轴扫描而设计的通用型三次元量测仪控制器,并含有处理器动力以同时运行测头座和三次元量测仪。它与SPA2伺服功率放大器连接在一起,后者在REVOTM/Renscan5TM型式,具有五轴扫描功能。
三次元量测仪控制器接口
我们采用UCC2的主要原因是为了控制三次元量测仪和REVOTM测头座系统。为了使三次元量测仪和测头座轴部能够同步,必须使用单一处理器才能克服准确计时和数据管理问题。
UCC以2 Khz的更新速率运行,能够在扫描时每秒收集2,000个点数据,就如同以500毫米/秒的速度在100毫米的孔内扫描时,每一转或是每0.25毫米即可收集约1250个数据点。
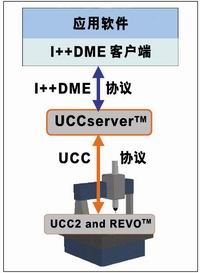
图6 |
而测头座和测头则以6 Khz的速度收集点数据,是UCC处理速度的三倍。这就意味着更多的数据可予缓冲,并对之前的过程进行分析且存放在所需的位置,这样不但不占用三次元量测仪的宝贵时间,而且还进一步提高了生产率。
除了要挑战数据管理的问题,还有一些同步问题也需要解决。工件表面的所有数据都来自于测头的探针端部。虽然已大致“知道”了基本的几何形状,但还必须对实际表面进行追踪。这就要求使用响应能力很强的伺服控制系统,使得当测头座的旋转方向改变和三次元量测仪的运动状况改变时,仍能够保持表面的接触。
所有的扫描系统都必须利用三次元量测仪三轴间的运动来保持表面接触,但是用于三轴扫描的扫描测头却是一种比REVOTM测头扫描范围大但低频率响应的装置,这才能让三次元量测仪的结构得以准确地作动,而测头足以在特定范围内保持偏转运动,但是这终究也会导致运动速度大幅降低。

图7 |
与传统的扫描测头相比,REVOTM具有更高的频率响应能力,因而会造成在设计上不得不考虑降低测头的扫描范围。但实际上,因为当三次元量测仪提供X、Y和Z轴的运动时,测头座可以保持测头的作动范围,所以这并不会有甚麽真正影响。当然,主要的问题是对各种输入和输出值进行同步处理以确定五轴运动。重要的是,必须组合测头座和三次元量测仪的比例输出,并采用一种特定方式处理,使得三次元量测仪和测头座的动作能够同步响应测头来自工件表面的反馈数据。所有这些操作都是在UCC2和SPA2系统中完成的。
与坐标测量机应用软件的集成
Renscan5TM和REVOTM通过I++DME接口而集成。I++DME是用于量测设备的应用软件间的共享接口。它是在量测设备硬件和编程用量测应用软件间之客户端/服务器模式的连接。
三次元量测仪制造商或应用软件公司必须提供客户端一种可以使用I++DME的通信协议。三次元量测仪控制器必须具有可通过I++DME通信协议的服务器应用程序。就像Renishaw公司的UCC是由UCCserverTM做到的。
这种方法的显著优点就是提高了Renscan5TM的能力,让所有量测应用软体包皆适用,通过UCCserverTM的所谓单一的“转汇出”,使该软件可以有后向兼容能力。
REVOTM应用
Renscan5TM毫无疑问地为三次元量测仪的更高量测效率打开了大门。它还将创造出更多令人兴奋的机会,使得人们可以研发更多应用,更能满足当前和未来的工业技术发展以及制造方法的需要。
REVOTM校准
使用任何量测系统时,都会涉及一个基本要素:校正。过去,必须对铰接式测头座每个转向位置的测头与探针组都进行校正。同时,对于固定测头座的扫描系统及其应用的探针群组,也必须进行校正。
采用REVOTM技术后,通过一种更成熟的方式来进行校正,转而将更多时间用来量测,而非花在校正上。重要的是,通过校正可以确定测头座和测头的几何关系。这使得所有位置都可以通过校正过程推论出来,举凡任何位置或轴相间的运动组合都可以准确地应用于量测上。通过编码器的读数和相关的编码器误差图,并将其与几何运算以及测头输出值相结合,从而计算出所有位置上的确切探针端点所在。
整个校正的程序与ISO10360-4测试的程序类似,该测试需要几分钟的时间;当此过程结束后,就可以推断出所有的位置。接下来的工作就是校正不同的测头和探针夹。同样,该程序也与几何校正的程序类似,只是更短一些。这样就可显著地节省时间,并使量测效率和精度方面已经非常明显的优势更令人印象深刻。
系统优点总结
引入Renscan5TM五轴扫描技术,可以大大地减少三次元量测仪的运动误差和相关动态误差。
将量测速度提高到最快500毫米/秒,也就相应提高了量测效率。
很高的点数据收集速率,最多为每秒收集6,000个点。
无限定位和五轴运动减少了在不同形状间的非必要性转换。
由于扫描作用力极小,探针几乎不会磨损。
由于采用了无限定位和五轴运动,因此可以量测难度大的复杂工件。
可以迅速校正,并推断出所有的位置,从而可将更多时间用于量测上。
有效工作长度最大可达500毫米。
连续旋转的能力得以简化工件之程序编制。
标准的M2探针,使用方便。
 |联系我们|法律声明|用户协议|AMT咨询|商务合作|会员入驻|积分充值|积分商城|积分奖励规则|TradEx全球购|加入QQ技术群|添加企业微信|加入微信技术群|文章投稿|
世界先进制造技术论坛™(简称AMT™, 制造知网™)
( 沪ICP备12020441号-3 )
|联系我们|法律声明|用户协议|AMT咨询|商务合作|会员入驻|积分充值|积分商城|积分奖励规则|TradEx全球购|加入QQ技术群|添加企业微信|加入微信技术群|文章投稿|
世界先进制造技术论坛™(简称AMT™, 制造知网™)
( 沪ICP备12020441号-3 )






 发表于 2016-9-1 15:27:55
发表于 2016-9-1 15:27:55
.jpg")







{kind=link}